
Bees, ants, and termites don’t need blueprints. They may have queens, but none of these species breed architects or construction managers. Each insect worker, or drone, simply responds to cues like warmth or the presence or absence of building material. Unlike human manufacturing, the grand design emerges simply from the collective action of the drones — no central planning required.
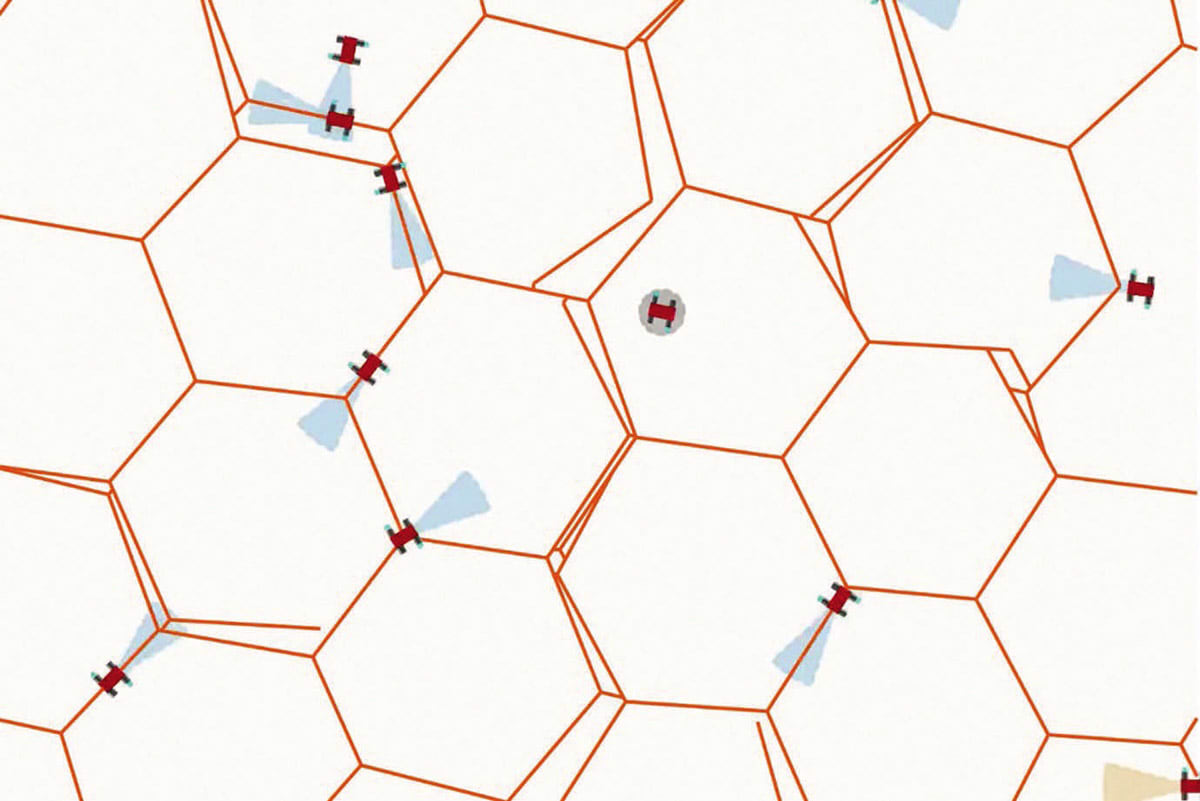
Now, researchers at Penn Engineering have developed mathematical rules that allow virtual swarms of tiny robots to do the same. In computer simulations, the robots built honeycomb-like structures without ever following — or even being able to comprehend — a plan.
“Though what we have done is just a first step, it is a new strategy that could ultimately lead to a new paradigm in manufacturing,” said Co-Senior Author Jordan Raney, Associate Professor in Mechanical Engineering and Applied Mechanics (MEAM). “Even 3D printers work step by step, resulting in what we call a brittle process. One simple mistake, like a clogged nozzle, ruins the entire process.”
Manufacturing using the team’s new strategy could prove more robust — no hive stops construction because a single bee makes a mistake — and adaptable, allowing for the construction of complex structures onsite rather than in a factory. “We’ve just scratched the surface,” said Raney. “We’re used to tools that execute a plan. Here, we’re asking: how does order emerge without one?”
From stone tools to space stations, human engineering has relied on planning: imagine the result, then design and build it in steps. Even 3D printing follows the same logic, slicing a model into thousands of precise instructions for the printer to follow.
“What’s so different about our approach is that it sidesteps that entire paradigm,” said Co-Senior Author Mark Yim, Asa Whitney Professor in MEAM, Ruzena Bajcsy Director of the General Robotics, Automation, Sensing and Perception (GRASP) Lab. “There’s no pre-written script, no centralized plan. Each robot just reacts to its surroundings.”
Because no single robot needs to understand the big picture, construction can continue even if some robots fail or go off course. And since all robots operate simultaneously, rather than waiting their turn, the process could one day be faster — and more robust to individual failures.
While inspired by nature, the researchers didn’t try to precisely mimic how bees, ants or other natural builders behave. Unlike artificial intelligence researchers, who often look to the brain for clues about how to design learning algorithms, this team wasn’t trying to copy biology.
Instead, they focused on the deeper principle that nature uses: simple behaviors, repeated many times in parallel, can add up to create something complex and useful.
“What we wanted was a system where structure emerges from behavior,” said Raney. “Not because the robots know what they’re building, but because they’re following the right set of local rules.”
The hard part was figuring out what those rules should be. “There are countless ways you could program a robot to react to its surroundings,” said Yim. “We had to narrow it down to something simple, but still useful.”
For more information, contact Holly Wojcik at