
Nanoactuators of a proposed type would exploit the forces exerted by electric fields on dielectric materials. As used here, “nanoactuators” includes motors, manipulators, and other active mechanisms that have dimensions of the order of nanometers and/or are designed to manipulate objects that have dimensions of the order of nanometers.
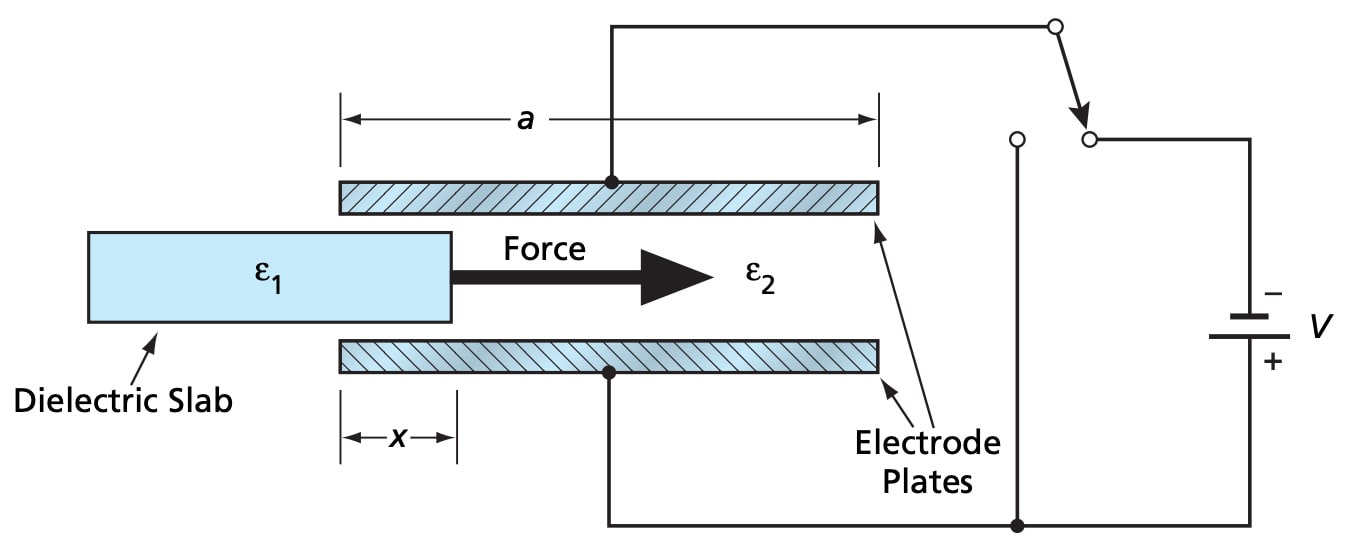
The underlying physical principle can be described most simply in terms of the example of a square parallel plate capacitor in which a square dielectric plate is inserted part way into the gap between the electrode plates (see Figure 1). Using the conventional approximate equations for the properties of a parallel-plate capacitor, it can readily be shown that the electrostatic field pulls the dielectric slab toward a central position in the gap with a force, F, given by
F = V2(ε1—ε2)a/2d,
where V is the potential applied between the electrode plates, ε1 is the permittivity of the dielectric slab, ε2 is the permittivity of air, a is the length of an electrode plate, and d is the thickness of the gap between the plates.
Typically, the force is small from our macroscopic human perspective. The above equation shows that the force depends on the ratio between the capacitor dimensions but does not depend on the size. In other words, the force remains the same if the capacitor and the dielectric slab are shrunk to nanometer dimensions. At the same time, the masses of all components are proportional to third power of their linear dimensions. Therefore the force-to-mass ratio (and, consequently, the acceleration that can be imparted to the dielectric slab) is much larger at the nanoscale than at the macroscopic scale. The proposed actuators would exploit this effect.
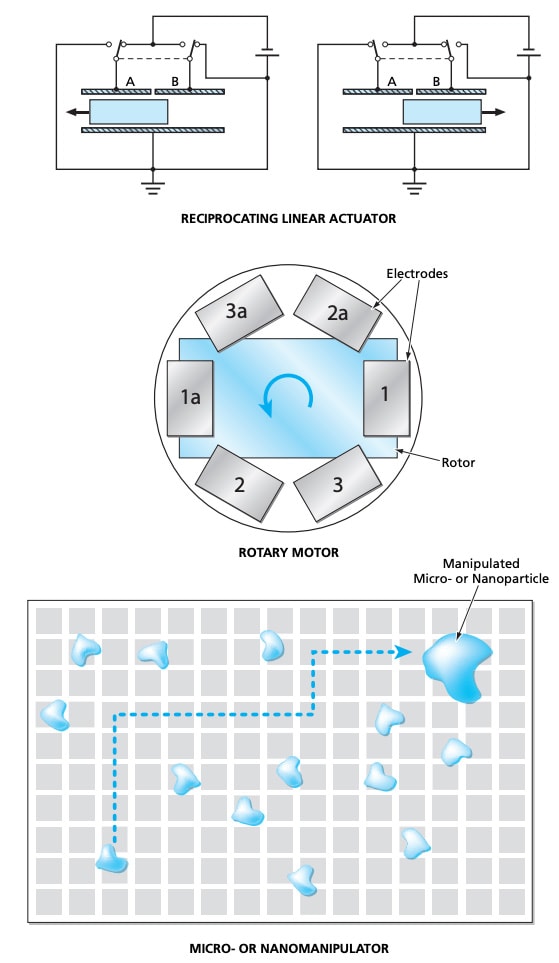
The upper part of Figure 2 depicts a simple linear actuator based on a parallel-plate capacitor similar to Figure 1. In this case, the upper electrode plate would be split into two parts (A and B) and the dielectric slab would be slightly longer than plate A or B. The actuator would be operated in a cycle. During the first half cycle, plate B would be grounded to the lower plate and plate A would be charged to a potential, V, with respect to the lower plate, causing the dielectric slab to be pulled under plate A. During the second half cycle, plate A would be grounded and plate B would be charged to potential V, causing the dielectric slab to be pulled under plate B. The back-and-forth motion caused by alternation of the voltages on plates A and B could be used to drive a nanopump, for example.
A rotary motor, shown in the middle part of Figure 2, could include a dielectric rotor sandwiched between a top and a bottom plate containing multiple electrodes arranged symmetrically in a circle. Voltages would be applied sequentially to electrode pairs 1 and 1a, then 2 and 2a, then 3 and 3a in order to attract the dielectric rotor to sequential positions between the electrode pairs.
A micro- or nanomanipulator, shown at the bottom of Figure 2, could include lower and upper plates covered by rectangular grids of electrodes — in effect, a rectangular array of nanocapacitors. A dielectric or quasi-dielectric micro- or nanoparticle (a bacterium, virus, or molecule for example) could be moved from an initial position on the grid to a final position on the grid by applying a potential sequentially to the pairs of electrodes along a path between the initial and final positions.
This work was done by Yu Wang of Caltech for NASA’s Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.techbriefs.com/tsp under the Machinery/Automation category.
NPO-30747
This Brief includes a Technical Support Package (TSP).
Nanoactuators Based on Electrostatic Forces on Dielectrics
(reference NPO-30747) is currently available for download from the TSP library.
Don't have an account?
Overview
The document titled "Nanoactuators Based on Electrostatic Forces on Dielectrics" from NASA's Jet Propulsion Laboratory discusses advancements in nanoactuator technology, focusing on the use of electrostatic forces to manipulate micro and nano-sized particles. It highlights the potential applications of these technologies in various fields, including aerospace, biology, and materials science.
The core concept revolves around the principles of electrostatics and the behavior of dielectrics in electric fields. When a capacitor is charged, it stores energy proportional to the charge and capacitance. The document explains how a charged plate capacitor generates a force that can pull a dielectric material into the capacitor, driven by the principle of least energy. This force remains consistent regardless of the scale, meaning that as the size of the capacitor decreases to the nanoscale, the force becomes significant enough to drive nano-sized devices.
The technology described includes the development of nano-sized motors and tweezers capable of trapping and manipulating particles ranging from bacteria and viruses to individual molecules. Laser tweezers, which have been traditionally used for trapping micro-particles, face challenges at the nanoscale. However, the proposed electrostatic methods can effectively control and position nano-sized particles, offering a new avenue for research and application.
The document also discusses the construction of a control board that can move nano-sized particles to desired positions, which could have implications for drug delivery systems, molecular assembly, and other applications in nanotechnology. The ability to manipulate materials at such a small scale opens up possibilities for innovative solutions in various scientific and engineering challenges.
In summary, this technical support package outlines the principles and potential applications of electrostatic forces in nanoactuator technology. It emphasizes the significance of these advancements in enabling precise control over nanoscale materials, which could lead to breakthroughs in multiple disciplines, including medicine, materials science, and aerospace engineering. The document serves as a resource for understanding the current state and future directions of research in this exciting field.