As modern machines have become more advanced, the complexity involved in motion control has escalated. Today, servos have replaced cams and gears on machines and multiple axis of synchronized motion control have become commonplace. Distributed motion control requires busses able to handle rigid jitter and timing demands including:
EtherNet/IP, PROFINET, POWERLINK, and EtherCAT comprise the four major buses used in motion control applications. High data throughput and low latency. Motion requires the controller to frequently update the drive with new trajectory setpoints. As a rule of thumb, each drive should get new setpoints at least every 1 μs.
Tight synchronization. Drives perform interpolation based on trajectory points to close the loop much faster than 1 μs. The interpolation loops must be synchronized to the controller and, for applications such as electronic gearing and camming, to other drives. As a rule of thumb, clocks should be synchronized to 1 μS.
Today busses such as CANopen and SERCOS have become dominant solutions for distributed motion control; however, they have limited options for I/O compared to more dominant busses such as PROFIbus, DeviceNet, and Modbus. With the emergence of industrial Ethernet busses, designers have a number of new options.
To make Ethernet viable for motion control, manufacturers are using new IT technologies such as packet prioritization using IEEE 802.1D/Q for Quality of Service (QoS) to reduce switch induced jitter and IEEE 1588 Precision Time Protocol (PTP) to enable distributed clock synchronization. Manufacturers are also layering other technologies such as Time Division Multiple Access (TDMA) and adding custom hardware.
There are over 30 different “Industrial Ethernet” protocols being marketed today, but four of them stand out as supporting I/O and motion on one bus and have multi-vendor support. Other popular Ethernet busses should also be considered, including SynqNet and Sercos III, but were not included because of limited I/O availability.
EtherNet/IP
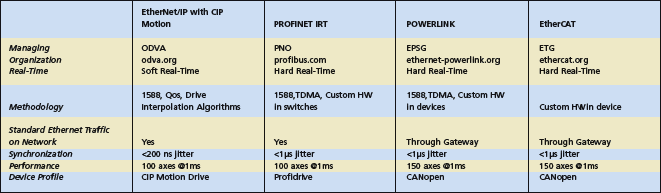
EtherNet/IP (ODVA.org) uses unmodified Ethernet with high-end switches that support QoS and 1588 to provide soft real-time performance. While devices supporting EtherNet/IP with CIP Motion are not yet released, Rockwell has demonstrated multi-axis synchronized motion using Ethernet/IP. Ethernet/IP with CIP Motion uses 1588 to synchronize clocks and QoS to prioritize packets and reduce the jitter on the network. Because it is impossible to eliminate all switch jitter using QoS, EtherNet/IP drives also implement an extrapolation algorithm to allow devices to ride through late data conditions. EtherNet/IP with CIP Motion is stated to provide less than 200-ns clock jitter and a cycle time of 100 axes at 1 ms.
PROFINET
PROFINET (Profibus.com) defines three levels, non real-time (NRT) used for slower updates (100 ms), real-time (RT) used for I/O updates (10 ms), and Isochronous real-time (IRT) used for motion control (1 ms). PROFINET IRT uses a combination of 1588, TDMA, and specialized switches to achieve hard real-time performance. When the network is configured, the master analyzes the network topology and the data required from each device and configures the network so each cycle has a real-time period and a non-real-time period. Each IRT device is assigned a time slot to communicate during the real-time period. Because all the IRT devices are synchronized using 1588, only one IRT device at a time sends packets. Switches with special ASICs buffer packets sent from non-IRT devices during the real-time period and transmit them during the non-real-time period. During the non-real-time period, any RT and NRT data as well as any standard TCP/IP traffic can be communicated. PROFINET IRT is stated to provide less than 1 μs clock jitter and a cycle time of 150 axes at 1 ms.
POWERLINK
POWERLINK (ethernet-powerlink.org) also employs TDMA to assure hard real-time performance, but instead of a distributed TDMA like PROFIBUS it implements a poll-select procedure. The POWERLINK master splits communication cycle split into a synchronous period and an asynchronous period. The master (called a manager) sends a poll request message to each slave (called a controller) and each slave answers with a poll response message. At the end of the synchronous period, the master requests non-time-critical data from the slaves. Standard Ethernet traffic is not allowed on a POWERLINK network so gateways are used to encapsulate standard Ethernet traffic on the network. POWERLINK is stated to provide less than 1 μs clock jitter and a cycle time of 100 axes at 1 ms.
EtherCAT
EtherCAT (EtherCAT.org) uses a standard network interface card on the master but uses specialized hardware on each of the slaves and uses the telegram structure of Ethernet but with a different operating mode. Instead of individual messages being passed from master to slave, EtherCAT uses a single message that passes through all slave devices, like a train passing through a number of stations on a route. Each slave device incorporates a special ASIC or FPGA that can read and write data into the packet while the frame passes by the node, similar to loading and unloading a train while it passes through a station. This enables EtherCAT to offer extremely high performance. Like Powerlink, standard Ethernet devices cannot coexist on an EtherCAT network and gateways are used to encapsulate Ethernet packets into EtherCAT frames. EtherCAT is stated to provide less than 1 μs jitter and a cycle time of 100 axes at 100 μs.
This article was written by Todd Walter, Motion Product Engineer at National Instruments, Austin, TX. For more information, please contact Mr. Walter at This email address is being protected from spambots. You need JavaScript enabled to view it., or visit http://info.hotims.com/15124-321 .