

The data gained from monitoring remote equipment is critical to the functionality of any industrial process. Often, this data is handled by a Supervisory Control and Data Acquisition (SCADA) control system often via an Ethernet and TCP/IP network over a bus, star, or tree topology. Industrial Internet of Things (IIoT) systems are often augmenting and in some cases, replacing these legacy systems to allow for a wireless network of nodes connected to a gateway that leads back to the cloud for more complex data processing and analytics. Regardless of the use of wired or wireless technologies, the underlying sensors used in these processes provide the backbone for the data required for assessing and analyzing plant equipment.
This article provides a birds-eye view of industrial machine health and asset monitoring applications as well as an overview of some of the commonly used sensor technologies.
Machine Health and Asset Monitoring Applications in the IIoT
Remote industrial machine health and asset monitoring applications span a massive range of industry verticals with a variety of sensor types used in tandem with wireless protocols to achieve real-time or quasi-real-time data transmissions. In the more traditional SCADA architecture, sensor/actuator nodes connect to industrial I/O modules — often programmable logic controllers (PLCs) or remote terminal units (RTUs). These I/O modules send sensor data to and from nodes based on feedback from supervisory computers — often Human Machine Interfaces (HMI) — gather and disseminate data based upon human input.
In the Industrial Wireless Sensor Network (IWSN), a number of sensor nodes wirelessly connect to a gateway in a point-to-multipoint (PtMP) topology via a licensed/unlicensed band and particular wireless protocol. In industrial applications, this can vary from industry-specific protocols such as WirelessHART, to cellular-based networks, to more commercial protocols such as Zigbee. This bypasses the wiring of separate I/O modules found in the SCADA architecture, compressing this hierarchy to simplified data transfers from sensor nodes, to a gateway/base station, to a centralized cloud-based platform to perform more complicated analytics.
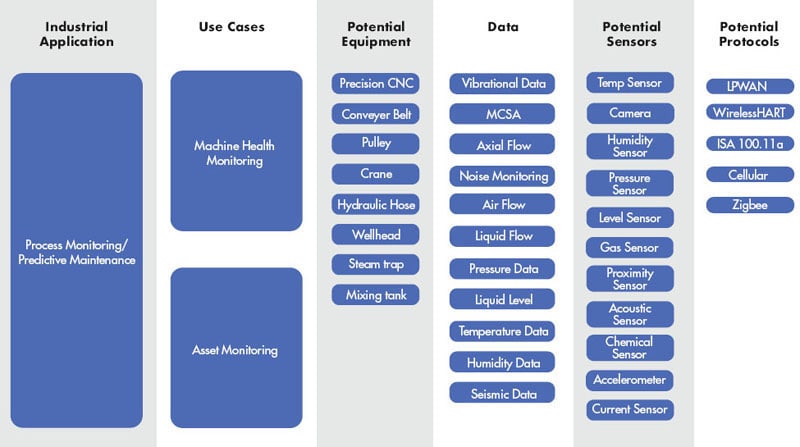
The applications of IWSNs for machine condition monitoring include industrial positioning equipment and motors/drives as well as asset monitoring applications (Figure 1). Inductive motors, for instance, are found in a huge range of machine equipment, from precision CNC machines to large industrial cranes, pulleys, and conveyor belts. Any faults in these machines can degrade mechanical accuracy or even cause a failure and factory downtime, directly diminishing valuable plant operational time with the additional cost of repair time. Some common mechanical failures for motors are: rotor bar cracking, short winding fault, air gap variations, and bearing faults.
Accelerometers are most commonly leveraged for vibration data analysis — most mechanical faults in rotating machines lead to a detectable increase in vibration levels. Additional measurements include Motor Current Signature Analysis (MCSA) where distortions in the current waveforms from a motor can extrapolate the particular fault based upon the amplitude of the peak and the frequency at which the peak occurs. This method of measurement is often accomplished by means of a clip-on current transformer (CT).
Aside from accelerometers and current sensors, temperature, humidity, pressure, and level sensors are leveraged often in IWSNs. In asset monitoring applications, for instance, tracking the tank fill level for chemical, food, and pharmaceutical mixing tanks is paramount in ensuring ingredients are put in at precise values. In these cases, pressure sensors can be used or various liquid level sensors can be used to measure the fill level of the tank. Airflow or liquid flow monitoring can be accomplished using both pressure and liquid sensors as well in industrial air filtration systems or in commercial HVAC systems. In water treatment and management facilities, filters exhibit pressure differentials at the influent (input) and effluent (output) lines where performance and clogging can be tracked and detected by pressure sensors.
A number of underlying fundamental principles (optical, electromagnetic, radar, mechanical, ultrasonic, acoustic, etc.) can be leveraged to accomplish the same sensing outcome. This variety can be found for level, humidity, and temperature sensors. The choice of technology is a balance among price, accuracy, form factor, ease of installation/calibration, response rate, and continuous or discrete monitoring. The next sections will touch upon some of the commonly leveraged sensors in IWSNs.
A Look at Commonly Used Sensors
Accelerometers – As stated earlier, accelerometers are a cornerstone component for the monitoring of machine equipment for vibrational data. This occurs by collecting parameters such as acceleration, deceleration, and shock from voltage data. This is turned into vibrodiagnostics in either the time-domain or frequency-domain. In the time-domain analysis, the collection and distribution of signal samples allow for the noticeable change in machine behavior over time. One simple form of time-domain vibration analysis involves defining “alarm limits” with the Root Mean Square (RMS) velocity of the machine’s housing (ISO 2372 standard).
Time-domain analysis generally has the setback of the inability to catch faults earlier, as more data needs to be collected to note an observable difference; however, time waveforms have the major benefits of classifying an event that is transient or intermittent. In the frequency-domain, the various faults yield apparent differences in spectral power content (i.e., peaks in vibration velocity at various frequencies) that allow for better fault isolation. While time-domain analysis is often leveraged to examine issues that are either already known or exhibit very specific patterns that are searched for, frequency-domain analysis allows for a broader survey of machine operation where identifying faults is far more apparent. Multi-axis accelerometers are particularly valuable, as they are able to collect data in both the axial and radial directions. Accelerometers can follow one of these fundamental principles: capacitive, piezoelectric, or piezoresistive.
The most commonly used are capacitive accelerometers where a spring-suspended proof mass shifts into unbalance under acceleration stress. This displacement is then registered by electrodes with a change in capacitance that ultimately yields an acceleration rate and acceleration direction. Piezoelectric accelerometers also use a proof mass; however, shifts in the proof mass instead cause shear stress to the piezoelectric material that translates directly to an electrically output. Similar to the pressure and level sensors listed in the previous sensors, an accelerometer can also exploit the piezoresistive principle using a proof mass and strain gauges to yield an acceleration result.

Current Sensor – Current sensor industrial applications can include MCSA analysis for machine equipment, smart metering, and in applications involving power supplies (e.g., inverter control, uninterruptible power supplies, welding, etc.). Current sensors leverage one of four basic principles: Ohm’s law, Faraday’s law, Faraday’s effect, or magnetic field sensing.
A resistive-shunt-type current sensor would leverage Ohm’s law and consists of a resistive element that acts in series to the current-carrying conductor whose current value is desired. This way, some of the current passes through the element, causing a voltage drop that is proportional to the current flowing through it.
Figure 2 illustrates an overview of various sensor technologies. Current transformers (CT) exploit Faraday’s law of induction. The transformer involves multiple windings around a magnetic core of high magnetic permeability. The primary winding, or the current-carrying conductor, can either be of a few turns or simply a line passing through the core. The AC flowing through the primary winding concentrates the magnetic flux lines within the core, or flux concentrator, which in turn induces a current within the secondary winding that is directly proportional to the current within the primary winding, offering a measurement of the current flow.
A rogowski coil uses the same principle, instead with a core with a magnetic permeability similar to air. The induced voltage within the secondary winding is proportional to the time-derivative of the desired current. Therefore, the secondary winding in a rogowski coil is terminated with an op-amp integrator circuit.
Hall-effect magnetic field sensors are also leveraged in either an open-loop or closed-loop architecture. The Hall Effect simply describes the perpendicular voltage vector that is generated in the presence of a current and magnetic field flowing through a strip of metal. An open-loop configuration looks similar to the current transformer in that the current-carrying conductor passes through the center of a magnetic core of high magnetic permeability. A Hall effect sensor is placed within a gap in the core, creating a voltage that is proportional to the current. This voltage, however, requires an amplifier, as the output voltage is small.

A closed-loop configuration instead involves a compensation coil, or secondary winding, that produces a field that opposes the current in the current-carrying conductor so that no magnetic field is seen at the Hall-effect sensor. The secondary winding is driven by amplifiers in the current sensing IC and is terminated with a load resistance. The current in the current-carrying conductor is proportional to the voltage at this output resistor.
Pressure Sensor – The term pressure sensor is generally used as an all-encompassing term that includes pressure sensor, pressure transducers and pressure transmitters. In general, pressure sensors produce a 10-mV output signal where this output signal can be used 10 to 20 feet from electricals without noticeable signal loss. Pressure transducers produce higher voltage outputs (0.5 to 4.5 V) that can travel beyond 20 feet without signal degradation. Pressure transmitters offer a current output signal of 4 to 20 mA. Pressure sensors can come in a number of configurations including Wheatstone Bridge-type/piezoresistive, capacitive, electromagnetic, piezoelectric, and optical.

This article focuses on the most common type of pressure sensors: the bridge-type/piezoresistive configuration (Figure 3). The most common pressure sensors rely on the piezoresistive effect where the change in resistance that occurs when a material is deformed correlates to the pressure the material is under. Typically, these sensors have a measuring diaphragm where the side of the diaphragm that faces the gas/liquid (i.e., hydraulic fluid, water, oil, etc.) is exposed to a “reference” pressure while the other side of the diaphragm is exposed to high pressure. In this case, the diaphragm deflects/deforms accordingly and strain gauges measure the difference in pressure between each to transduce this information to an electrical quantity ready for transmission.
Strain gauges essentially act as resistive elements whose change in resistance is proportional to the amount of strain put upon them. These strain gauges are either a bonded-foil type manufactured through a sputter deposition process or a diffusion, silicon-type strain gauge that is also known as a semiconductor strain gauge, as it is produced by diffusing impurity into a silicon based diaphragm. The foil-based strain gauge has the benefit of withstanding higher pressures while the semiconductor-based strain gauge offers a higher sensitivity so it is often leveraged at lower pressures. However, silicon strain gauges are highly influenced by temperature and therefore tend to have lower operating temperatures than foil strain gauges.
Liquid Level Sensor – Level sensors detect the amount of liquid, powders, or granular material (e.g., pellets) within a container. Not unlike the pressure sensor, this measurement can be accomplished in a variety of ways. The table above lists some of the methods with a description and some major considerations for each type of level sensor. This section will focus on the hydrostatic, diaphragm-based sensor.
The hydrostatic level sensor, in particular, relies on the same fundamental piezoresistive principles as the bridge-type sensor found in the pressure sensor. In fact, this type of liquid level sensor is a pressure sensor where the rising/falling level of liquid within a tank correlates to a change in pressure within the diaphragm and thus maintains a highly linear relationship with the depth of liquid in the tank. As shown in the equation below, the static pressure (P) of liquid is equivalent to the specific gravity of the liquid (γ) and the height of the liquid ( h).
P=γ*h
Conclusion
Understanding the underlying sensor technologies used in industrial monitoring applications can offer insight for anyone involved in the design and development of industrial systems. Each sensor can leverage a variety of fundamental principles, each of which has its own respective benefits and considerations for the application. The collection and dissemination of the data acquired from these sensors can either involve a wired or wireless backbone where IIoT in particular has the potential for more complex data analytics for future industrial applications.
This article was written by Tinu Oza, Product Line Manager at L-com, North Andover, MA. For more information, visit here .
Reference
- Lewis, Joe. Solids Level Measurement and Detection Handbook. Momentum Press, 2014.