

Light detection and ranging (LiDAR) provides the type of velocity data about objects and vehicles that are necessary to enable the type of decision-making necessary for navigation systems in autonomous vehicles. However, most LiDAR sensors that have been used in automotive and other mobility applications have been fragile, expensive and unreliable.
Omnitron Sensors Co-founder and CEO Eric Aguilar has developed a key component for LiDARs featured in autonomous vehicles, based on his experience working with LiDAR in a variety of past roles with some of the world’s largest technology providers and manufacturers.
“I first discovered this when I made the jump from core sensor development to integrator. Initially, I worked with LiDAR at Wing, a Google X program for autonomous delivery drones. At Tesla, I led the firmware integration team that took Model 3 from prototype to production. As I moved on to Argo AI, Ford and Volkswagen’s former robotaxi business, I continued to grapple with LiDAR-related issues,” wrote in a May 2023 opinion article for Electronic Engineering Times, discussing his experience working with LiDAR in the past.
Aguilar’s company has developed a microelectromechanical systems (MEMS) scanning mirror that has the potential to disrupt and outperform older optical subsystems — such as voice coils, spinning polygons and galvos — and meet the demanding requirements of LiDAR for autonomous vehicles with the type of manufacturability and scalability the automotive industry needs.
Leveraging the collective team’s extensive experience designing, fabricating, and using MEMS sensors, Omnitron has also developed a “new topology for MEMS” that addresses some of the “most pressing pain points in MEMS manufacturing,” according to the company’s website.
Featuring a unique arrangement of silicon process steps and a new packaging method, Omnitron is now proving that its topology can produce low-cost MEMS sensors in high volumes by partnering with a commercial MEMS foundry. The company’s first proof point of its new topology for MEMS is a large, robust, low-cost, MEMS scanning mirror for long-range LiDAR. In September, Omnitron announced it would start working with Silex Microsystems—the world’s largest pure-play MEMS foundry—on manufacturing and commercializing its MEMS scanner for LiDAR.
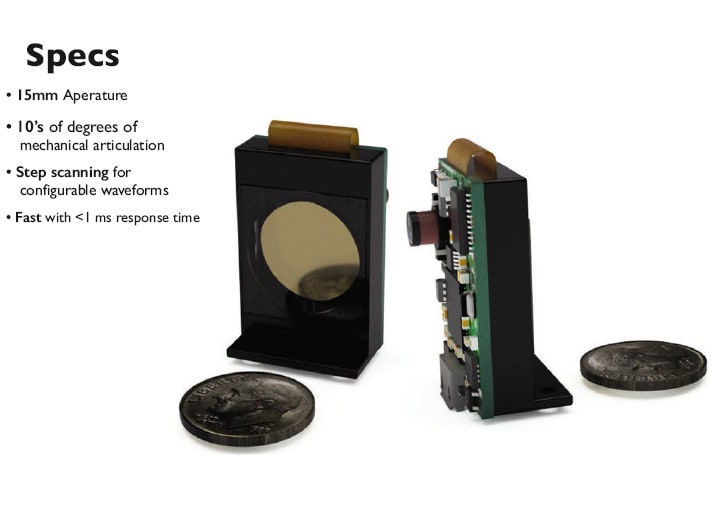
During an interview conducted over Zoom, Aguilar, showed test prototypes of their MEMS scanning mirror that were about the size of a dime. Aguilar discussed his company’s progress with their MEMS scanning mirror and how it could help eliminate the challenges that has made LiDAR too expensive for automotive applications in recent years.
P&IT: What is the basic functionality enabled by LiDAR for an autonomous vehicle’s navigation system?

Eric Aguilar: Autonomous vehicles and robots, the way they fundamentally work, is for a robot to move its arms or a car to drive down the street, it needs to know what obstacles are in its way, how far the obstacles are, and even if these other obstacles are moving. The best sensor for that is a sensor that gives you three-dimensional data and the richer that three-dimensional data is, the more capable this robot or autonomous vehicle is going to be.
P&IT: How does that help the autonomous vehicle navigate or safely drive down a street or highway in traffic?
Aguilar: One major way is that it provides velocity information, which gives you intent. For example, if you’re driving down a city street, the vast majority of cars are parked and you don’t want to be spending your precious autonomous vehicle computation power on things that aren’t moving. So having a LiDAR that also has velocity information helps get rid of all of that noise and just focus on the things that matter, such as a car crossing an intersection. That information is really valuable and with new FMCW (frequency-modulated continuous wave) LiDARs, it gives you that extra dimension of information that makes autonomous navigation easier.
P&IT: What is an FMCW Lidar?
Aguilar: The two main types of LiDAR modalities include time of flight, where the laser beam shoots out from the sensor, bounces off an object, comes back and by measuring that time difference, the distance can be determined. That approach, in autonomous navigation applications can suffer from interference issues and often ends up providing useless information. With the second main type of LiDAR modality, FMCW, you have a LiDAR that is immune to interference because it’s using a frequency modulation continuous wave form. The frequency provided by that continuous waveform is very precise information that allows you to really eliminate a lot of the spurious noise that often comes from LiDAR systems. In fact, it’s almost impossible to interfere with it because you have a locked in amplifier that knocks out all of that noise. The FMCW LiDAR also provides velocity information or information about the intent of an object or person.
P&IT: What are some of the other components within the autonomous vehicle navigation system that LiDAR must integrate with and work with or rely on?
Aguilar: You need an array of sensors, computational power and algorithms. LiDAR is one of the key sensors in the system, but it does not give you color and it cannot be roadside, so you want cameras that give you that color information. Radar is another valuable component, especially when dealing with environments where weather could cause your LiDAR to stop working, having that additional radar sensor is valuable. Other sub components include speed encoders, IMUs (inertial measurement units) and GPS, because you need to know where in the world you are. There’s also a significant amount of math data that gets pre-loaded onto the vehicle, and then there are usually artificial intelligence (AI) algorithms that are either heuristic or in some cases developed on a deep neural network and placed in the car once they’re mature enough. The camera must be aligned with the LiDAR which must be aligned with the radar, which is a challenging aspect of developing a vehicle-ready LiDAR system.
P&IT: What has traditionally made LiDAR too expensive to be manufactured at scale for autonomous vehicles and the broader automotive market?
Aguilar: The pain point stems from having to precisely align and calibrate all of the sub-components of a LiDAR system together. In most LiDAR systems, the major sub components include a lens, mirror, laser, and detector. All of those have to be aligned to sub-micron level tolerances. That’s thinner than a human hair. To manufacture that LiDAR, you’re using a machine to do the sub-micron adjustments, and this is the most cost prohibitive step in the manufacturing process. If you look at the bill of material and the components required to build an actual LiDAR, it’s actually not that bad. It’s this active alignment step that is the most challenging.
P&IT: What about once the LiDAR is part of the navigation system on the autonomous vehicle?
Aguilar: Once it’s placed on the vehicle, it shakes, and it shakes all the time from speed bumps and that sort of thing. The LiDAR components will also go through temperature fluctuations of 20 to 30 degrees daily, so you have these components that are expanding and contracting continuously. That’s why in designs I worked on in the past, we saw significant issues with the reliability of these devices. That also needs to be fundamentally addressed to truly make LiDAR viable for the automotive market. I’ve had direct experience working with LiDAR systems in autonomous vehicle navigation systems and I had to develop an entire routine just in making sure that the LiDARs were working before performing road tests. There are some LiDAR options available now that are pretty good, but most of that are capable of helping enable autonomous navigation could range from two to five thousand dollars, and we need that to come down to the range of a few hundred dollars.
P&IT: What type of innovation is Omnitron bringing to LiDAR that can address these challenges?
Aguilar: We’ve moved away from the designs of the past such as the expensive voice coils, bulky scala mirrors and the wobbly spinning polygon and into a new generation MEMS mirror that is the right size for the automotive market. Our step-scanning MEMS mirror is about the size of a dime ranging from 10 to 15 mm, large enough to move the tens of degrees needed for a wide field of view in LiDARs for autonomous vehicles. We’ve also developed a powerful motor that will not shake or wobble, and there is a sophisticated encoder that allows accurate measurement of where the mirror is pointing when it shoots the laser. There’s no spinning, because it is a step scanner, which dramatically improves performance and reliability.
P&IT: What are you doing on the manufacturing and design side to make the cost of developing LiDAR cheaper for autonomous vehicle applications?
Aguilar: We’re leveraging semiconductor processes and our core IP, so that I can make hundreds of these devices at once, instead of one at a time. We had multiple bids for fabricating our chips and we ended up selecting Silex, and by leveraging the standard tools and processes already found in the Silex fab, we’re clearing the way for robust, reliable and affordable MEMS devices that are delivered to market quickly and at high volume. As a new topology for MEMS, our IP rearranges the manufacturing processes and supports them with new packaging techniques. Our vision is to make LiDAR as cost effective and ubiquitous as high resolution cameras are to smartphones.
This article was written by Woodrow Bellamy III, Editor, Photonics & Imaging Technology, SAE Media Group.