Stories
0
9450
30
Briefs: Sensors/Data Acquisition
Extensible Data Gateway Environment (EDGE)
The NASA Physical Oceanography Distributed Active Archive Center (PO.DAAC) is NASA’s designated data center for information relevant to the physical state of the ocean. Its core datamanagement and workflow system, Data Management and Archive System (DMAS), is responsible for processing hundreds of...
Products: Aerospace
Xenics, Leuven, Belgium, offers the Bobcat-320 SWIR camera, a medium-resolution camera yielding low noise and low dark current. It features a thermo-electric cooler for sensor stabilization, an onboard image processing unit, and...

Briefs: Sensors/Data Acquisition
Flight Test Maneuvers for Efficient Aerodynamic Modeling
Flight testing is expensive. It is therefore important that necessary flight data be collected in the most efficient manner possible. Inputs traditionally used for flight test maneuvers to collect aircraft stability and control data include doublets, impulses (stick raps), multisteps, and...
Products: Manufacturing & Prototyping
AutomationDirect (Cumming, GA) offers ProSense FMM Series magnetic-inductive flow meters (magmeters) for liquid flow monitoring in industrial processes. The magmeters, available with 1/2" to 2" NPT female process connections, are...

Briefs: Sensors/Data Acquisition
JPL CO2 Virtual Science Data Environment (VSDE)
The JPL CO2 Virtual Science Data Environment (VSDE) (http://co2.jpl.nasa.gov) is a comprehensive effort to bring together the models, data, and tools necessary for atmospheric CO2 research. The VSDE site is designed to provide streamlined Web-based discovery and access to multiple global and regional...
Products: Test & Measurement
Instruments for Industry, a unit of AMETEK Compliance Test Solutions (Edison, NJ) introduced the S21-4KWP-2KWP FLEX solid-state micro wave pulse power amplifier with a frequency range of 1.0 GHz to 2.0 GHz. It supplies 4...

Briefs: Sensors/Data Acquisition
Python Advanced Microwave Precipitation Radiometer Data Toolkit (PyAMPR)
Advanced Microwave Precipitation Radiometer (AMPR) brightness temperature data from NASA field projects are in ASCII format. This Python script defines a class that will read in a single file from an individual aircraft flight and pull out timing, brightness temperatures from...
Products: Test & Measurement
Slaughter Company (Lake Forest, IL) announced the 260 Series Ground Bond testers with an improved interface that eliminates menus and redundant button pushes. The interface allows manufacturers to set up and run Ground Bond...

Briefs: Sensors/Data Acquisition
Data Ordering Genetic Optimization (DOGO) System
Observations in modern datasets have a continuum of quality that can be hard to quantify. For example, satellite observations are subject to often-subtle mixtures of confounding forces that distort the observation’s utility to a varying extent. For the Orbiting Carbon Observatory-2 (OCO-2)...
Products: Manufacturing & Prototyping
The U1280 and U1240C Series handheld digital multimeters from Keysight Technologies (Santa Rosa, CA) feature 60,000-count display resolution and 0.025 percent accuracy. The 4.5-digit handheld DMMs are suited for electronics...

Briefs: Sensors/Data Acquisition
Advanced Rapid Imaging and Analysis for Earthquakes
Advanced Rapid Imaging and Analysis for Earthquakes (ARIA-EQ) will be the first coordinated effort to automate geodetic imaging capabilities so they can be used for hazard response. The innovation is an automatic geodetic imaging data system that is the foundation for an operational hazard...
Products: Test & Measurement
National Instruments (Austin, TX) introduced a high-performance model of the software-based VirtualBench all-in-one instrument that combines a mixed-signal oscilloscope, function generator, digital multimeter,...

Briefs: Sensors/Data Acquisition
Saliva is an easily accessible body fluid containing important biological markers of physiological regulation in the body. The ability to use saliva to monitor the health and...

Products: Manufacturing & Prototyping
Bristol Instruments (Boston, MA) introduced the OM502T Series of monitors for strain gauge sensors. The 5-digit instruments are programmable for mathematical functions, including peak and tare, as well as digital filters....

Briefs: Sensors/Data Acquisition
Cryogenic Propellant Feed System Analytical Tool
The Propellant Feed System Analytical Tool (PFSAT) predicts heat leak based on insulation type, installation technique, line supports, penetrations, and instrumentation. It also determines the optimum orifice diameter for an optional thermodynamic vent system (TVS) to counteract heat leak into the...
Products: Manufacturing & Prototyping
The AEGIS® CAT II/III Shaft Voltage Tester™ digital oscilloscope from Electro Static Technology (Mechanic Falls, ME) enables testing of industrial motors controlled by variable frequency drives (VFDs). The tester is...

Briefs: Electronics & Computers
Radiation-Hardened, High-Voltage, Quad-Channel Amplifier
Aradiation-hard, 130-Volt, 100-KHz capable, quad-channel operational amplifier with corresponding power supply and 6th-order Bessel filter circuitry has been designed, fabricated, and successfully tested. To control two-axis microelectromechanical systems (MEMS)-based mirrors, a differential...
Products: Test & Measurement
Saelig Co. (Fairport, NY) announced Rigol DSG800 RF signal generators with output frequencies from 9 kHz to 3.0 GHz. They provide an RF signal source with a maximum output of +20 dBm and frequency resolution of 0.01 Hz at...

Briefs: Electronics & Computers
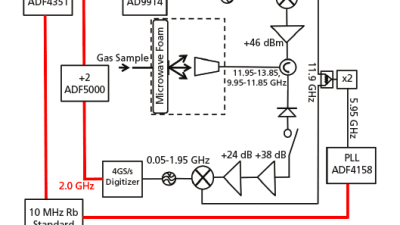
Microwave spectroscopy is an invaluable tool for studying the structure, dynamics, and even the handedness of gas phase species. In...
Briefs: Electronics & Computers
Signal Digitizer and Cross-Correlation ASIC
Microwave interferometry provides a means of synthesizing large scanning antennas that are not otherwise physically practical for spaceborne Earth observational systems. By cross-correlating multiple receivers of an array, high-resolution images are synthesized from a sparse — or thinned — array of...
Briefs: Electronics & Computers
Image Capture to Stereo Correlation in an FPGA
In this work, there were four independent vision modules implemented in an FPGA: a CameraLink camera interface, rectification, bilateral filtering, and stereo disparity correlation. Each module was originally designed to run from end to end, not in a pipeline with the other modules. This limited...
Briefs: Electronics & Computers
Constellations of low-cost, small instruments provide global, distributed, and frequent coverage, enabling unique science observations. However, radars are active instruments...

Briefs: Materials
Flexible, High-Temperature Polyimide/Urea Aerogels
Cross-linked silica-based aerogels with polymeric materials, as well as incorporating a flexible linkage into the underlying metal oxide, have been proven to improve strength and resilience over their native, or non-cross-linked, counterparts without adversely affecting porosity and density. In...
Briefs: Materials
Cryogenic fluid management (CFM) is a critical technical area that is needed for the successful development of future space exploration. A key challenge is the storability of LH2, LCH4, and LOX propellants for long...

Briefs: Materials
Colorimetric Indicator for Detection of AF-M315E
An easy and instant method of detection was needed for AF-M315E, a “green” propellant that produces very little vapor. This makes it hard to detect by smell or other active sensors.
Briefs: Materials
Oriented Nanofibers Embedded in a Polymer Matrix
A method of forming a composite of embedded nanofibers in a polymer matrix with a high degree of alignment has been created using a nanofiber continuous fiber (NCF) system. This innovation incorporates nanofibers in a plastic matrix forming agglomerates, and then uniformly distributes them by...
Briefs: Materials
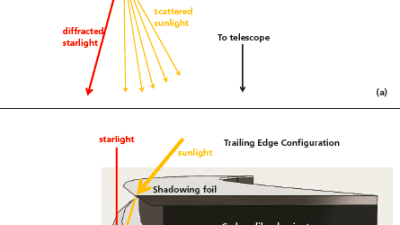
A starshade occulter is a large space structure whose shape is specially designed to produce a diffraction pattern in starlight that can aid a telescope in direct imaging of exoplanets. The diffraction pattern...
Briefs: Manufacturing & Prototyping
Method to Improve the Synthesis Process of High-Purity Bulk Multi-Element Compounds
Multi-element compounds have been used ubiquitously in various applications, including electronics, optics, opto-electronics, thermoelectrics, superconductivity, and the recently developed application of spintronics. Besides being the main components of some of...
Briefs: Manufacturing & Prototyping
Laser Subdivision of the Genesis Concentrator Target Sample 60000
A need arose for approximately 1 cm2 of a diamond-like-carbon (DLC) concentrator target for the analysis of solar wind nitrogen isotopes. The original target was a circular quadrant with a radius of 3.1 cm; however, the piece did not survive intact when the spacecraft suffered an...
Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Power
Upcoming Webinars: Power
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure