
Robotics are now and have been an inextricable aspect of American industry, performing tasks as varied as the robots themselves. Robots can, in most cases, accommodate greater production speeds, and can be re-tasked for any future changes or even re-assigned to a different application. As technology advances, and demand and expectations grow, robotic systems are being developed displaying greater abilities in precision control and dexterity. The printing and packaging industries are no different, and when Roskam Automatic Machine (Birmingham, AL) developed a robotic end effector — what amounts to a robotic “hand”— to integrate with other robotic systems (industrial manipulators, or the “arms”), it relied on the pneumatic devices from Parker Hannifin (Cleveland, OH) to help run the robotic “fingers.”
Roskam integrated the part into its end effector systems due to the P1X’s piston design. Unlike most air cylinders, whose pistons are round, the rodless, banded P1X is oval, a design that adds to the unit’s all-over strength and force endurance. Load capability and capacity were primary concerns for Roskam, whose application-specific robotic hands must pick and place a variety of products that are often very heavy, with a single hand unit. The P1X series, primarily made of aluminum, also was chosen for its light weight. A typical industrial manipulator, the type of “arm” robot to which the end effector is attached, can on average handle a maximum carrying capacity of 350 pounds — a figure that already includes the weight of the end effector. A heavy end effector would necessitate a larger, stronger, and possibly slower and more energy-consuming industrial manipulator unit that might not be able to handle a particularly heavy load or work with the speed the printing industry has come to demand. The less weight the end effector contributes to the overall payload, the more products the robot system can handle, assuring a timely production line.
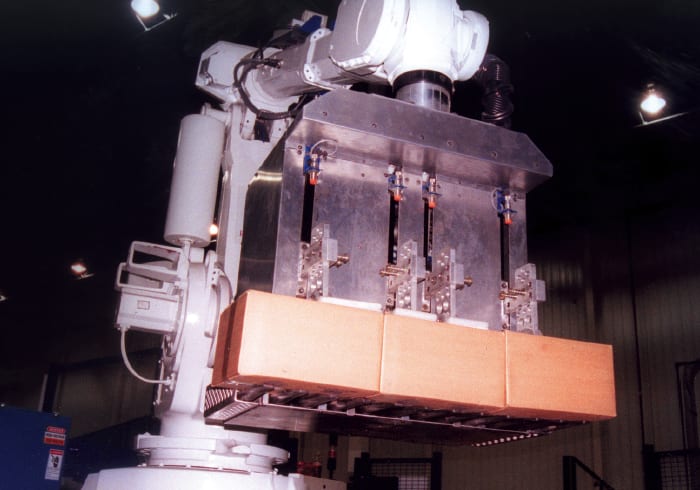
Roskam has more than 200 units in place in the printing industry, all of which are running 24 hours a day every day constructing brick pile stacks of magazines or picking up loose printed pages such as inserts and slip sheets. Brick pile stacks refer to the stacks of magazine pages that have gone through a machine that has compressed the pages to get as much air out as possible, making a very tight, and very heavy, processed stack of paper. The P1X cylinders allow the flexibility of picking up one, two, three, or four stacks of magazines. With some modification, the same hand-unit later moved to the packaging industry, moving up to four boxes. The clamps allow flexibility of stacks or boxes ranging from 4 to 18" high. Roskam end effector systems can also provide stack inversion with the addition of a robot regrip table if needed.
More Information
For more information, contact Tim W. Jones, Pneumatic Territory Manager–Automation Group at Parker Hannifin Corp., at