
The ability to position an object at various locations corresponding to a portion of a spherical surface has long been accomplished using nested goniometers, in which, as observed from above, the apparent motion is readily described in a Cartesian ("XY") frame. In certain applications, however, a more suitable basis of motion would be described in a polar coordinate ("R-Theta") frame. The implementation and advantages of such a device is described here.

Figure 1 schematically depicts a proposed device that produces R-Thetabased goniometric motion. The curved radial stage, while functionally the same as a conventional single-axis goniometer, is mounted to a rotary stage offset to one end of the radial stage. The resulting device can position an object mounted on the radial stage carriage to any location on the surface of the sphere defined by the curvature and extent of the radial stage.
Figure 2(a) shows the R-Theta device compared to the XY form. As compared to the typical XY nested-goniometer approach, the R-Theta implementation has only 25 percent of the mass, and occupies only 25 percent of the volume. Further, the moving mass of the R-Theta form is 50 percent that of the XY form. Note that these percentages are approximate, and will depend on the exact implementation chosen for the device (for example, material choice and light-weighting techniques, if utilized).
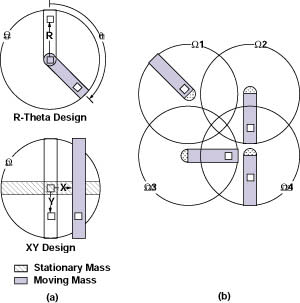
The initial application for which the R-Theta form was designed was for a multiple telescope platform, which required the ability to move four independent telescopes in such a way that all four pointed through a common point in space, while maintaining a fixed distance from that point. In addition, the scientific requirements of the mission were best served if the four telescopes could also have partially overlapping fields-of-regard on the sky. If implemented in the typical XY form, the necessity of maintaining clearances between all of the moving elements would have forced a larger than desired separation between the telescopes, and could not provide the overlapping fields-of-regard without significantly restricting the total motion of one or more telescopes. By using the R-Theta form instead, a denser packing could be achieved, and by judicious trajectory planning, the significant overlap in the telescope fields-of-regard could be implemented [Figure 2(b)].
As a final note, it is apparent that the carriage on the radial stage experiences a rotation with respect to a global coordinate system as the rotary stage is actuated. If this effect should be undesirable in a given application, a synchronized derotation stage could be added on top of the radial stage carriage; such a stage could also be used to provide arbitrary orientations, if desired.
This work was done by Jeffrey M. Oseas and Robert J. Calvet of Caltech for NASA's Jet Propulsion Laboratory.
NPO-20795
This Brief includes a Technical Support Package (TSP).
Asymmetric Dual-Axis Gonimeter for Positioning on a Sphere
(reference NPO20795) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a technical support package from NASA detailing an innovative Asymmetric Dual-Axis Goniometer designed for positioning objects on a spherical surface. This device utilizes a polar coordinate system (R-Theta) rather than the conventional Cartesian (XY) system, offering significant advantages in terms of size, weight, and operational efficiency.
The R-Theta goniometer is mounted on a rotary stage, allowing it to position an object on the surface of a sphere defined by the curvature and extent of its radial stage. Compared to traditional XY nested goniometers, the R-Theta design is approximately 25% lighter and occupies only 25% of the volume, with the moving mass being 50% that of the XY form. These reductions are contingent on the specific implementation, including material choices and lightweighting techniques.
The primary application for this device is in a multiple telescope platform, where it is crucial for four independent telescopes to point through a common point in space while maintaining a fixed distance from that point. The R-Theta goniometer allows for a denser arrangement of telescopes, facilitating overlapping fields-of-regard on the sky, which is essential for the scientific requirements of the mission. In contrast, using a traditional XY goniometer would necessitate larger separations between telescopes, limiting their operational capabilities.
The document emphasizes the novelty of the R-Theta goniometer, highlighting its ability to achieve complex goniometric motion with a simpler control system. This is particularly beneficial for automated systems, as it reduces the complexity associated with compound motions required in XY systems. The invention addresses the challenges faced by the Space Interferometry Mission design team, which sought to meet stringent performance requirements while minimizing mechanical complexity and volume.
Overall, the document outlines the technical advancements and potential applications of the R-Theta goniometer, showcasing its role in enhancing the efficiency and effectiveness of telescope positioning in space missions. The work was conducted at the Jet Propulsion Laboratory under NASA's contract, reflecting the agency's commitment to advancing technology for space exploration.