

The global market for mobile robotics is expanding rapidly. With the advent of lower-cost robots that are easier and cheaper to deploy, collaborative robots or cobots are finding new industrial and consumer applications. Cobots use position and torque sensing embedded into their joints to allow automated control and their safe operation. ISO 10218-1 is an international standard that sets out requirements for safety and design guidelines in industrial robots.
This typically requires using at least one force torque sensor in addition to monitoring the electric motors in the joints. Some more recent cobots have torque sensing in every joint such as the cobots made by Doosan and the latest KUKA LBR iiwa machines.
In addition to helping meet the ISO 10218-1 safety standard, the use of multiple torque sensors also allows the robot manufacturer to improve system control with advanced kinematics using inputs from the torque sensors to compensate for the mass of the robots limbs and the payload to deliver fast, controlled, and safe movements of the robot.
There is also a market for sensor systems as an accessory or built into robotic tools to help control the operation of the tool. There are currently two key technologies for torque measurement in robotics applications — strain-gauge sensors and displacement sensors.

Strain-Gauge Sensors
This is the conventional method for measuring rotating torque by using a strain gauge attached to a flex plate in the joint of the robot. Changes in strain, because of torque, are recorded as variations in an electrical signal.
Advantages of strain gauges are that they are relatively low cost and simple to apply in low volume like a test lab. However, there are also disadvantages of strain gauges in robotic joints including:
They require the use of flex structures and four gauges being arranged in a Wheatstone bridge circuit to provide a measurable strain. This compromises the mechanical integrity of the system making the robotic arm less stiff than it could be without the sensors.
Strain gauges are typically not robust or resilient to harsh environments and their output is affected by temperature.
They are susceptible to interference from background electromagnetic radiation and magnetic fields.
Displacement Sensors
This method typically uses a pair of measurement disks attached at opposite ends of a shaft the ‘twist angle’ of the shaft is measured from the phase difference between them through an optical or magnetic measurement. This enables torque to be calculated.
The main advantage is the ability to overload the sensor to the maximum load capacity of the “twist shaft.” The disadvantages of this method include:
It requires a reduced diameter section of the shaft known as a torsion bar to enhance the twist angle (several degrees at most for a length-to-diameter ratio L/D = 5) which can have a negative effect on the mechanical stability of the system.
It’s sensitive to temperature.
There is limited measurement accuracy.
It requires a larger packaging volume due to the need to measure shaft twist along the torsion bar length.
Both of these existing technologies require an element of twist or flex in the robots joints, which means that the robotic arm will flex in operation. This can be a factor limiting performance and repeatability of the cobot.
Non-Contact Sensing
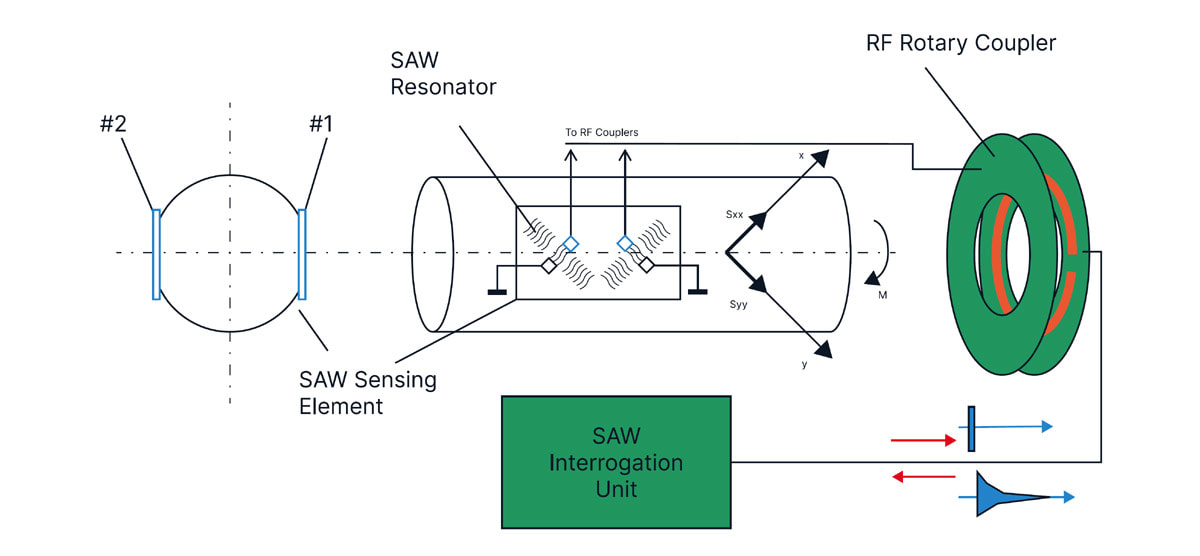
Transense’s Surface Acoustic Wave (SAW) sensor technology provides an improved way to measure torque, rotation and temperature in a robotic system, eliminating joint flex and creating higher performing and more repeatable robot with more compact joints. SAW technology is a wireless, passive, non-contact sensing system consisting of two main components:
- SAW sensing elements connected to antenna or RF coupler mounted on the rotating shaft.
- An electronic interrogation unit called a reader, connected to its RF Coupler.
The reader creates an interrogation signal which is transmitted to the rotating shaft through the RF coupler. The sensing elements on the shaft do not require any other power source and work as a passive device reflecting an interrogation signal back to the reader electronics. The backscattered signals frequency of oscillation is affected by a physical measurement such as strain and temperature.
The reader analyses the received back-scattered signal and calculates the value of the physical strain and temperature, the shaft surface strain gives an accurate measurement of shaft torque.
The read range for passive wireless sensors is limited by the interrogation power and depends on the required sensor resolution and the update rate. For an interrogation power of 10mW and requiring an update period of tens of milliseconds the typical sensor read range does not need to exceed a few meters. In most non-contact, rotating, torque measurements applications, the distance between the sensor antenna and the reader antenna does not need to be more than 10 mm, and the torque update period can be as small as 100 microseconds.
The key part of the SAW sensing element is a small lightweight SAW device made on a polished piezoelectric substrate. The surface acoustic wave propagates on its free surface after being excited by a miniature Inter-Digital Transducer (IDT). The IDT is a thin-film aluminum structure formed by a standard photolithographic process which is used for manufacturing integrated circuits.
The IDT converts electric RF pulses, with a frequency of hundreds of MHz, into the SAW and due to the piezoelectric effect returns them into a RF signal. If the IDT is surrounded by the Bragg reflecting gratings, in the form of periodic arrays of thin aluminum strips, then the energy of the SAW is trapped inside the cavity between the gratings and the SAW device works as a resonator.
When the strain is applied or the temperature of the substrate changes, the physical dimensions of the substrate and the SAW velocity also change. This makes the resonant frequency sensitive to strain and temperature, as well as allows the SAW resonator to be used as a strain and temperature sensing element.
The technology is already proven in challenging applications for example, McLaren Applied supply the technology to motorsport teams and championships across the world, for use in racing car powertrains to measure and manage engine performance. The technology is used by GE to make its latest T901 turbine engine for defense helicopter applications more efficient and reduce maintenance costs.
Transense is also working with several manufacturers of electric drive systems in the automotive market where SAW technology can be used to measure electric motor output torque and rotor temperature to improve motor control and functional safety. The ability of the SAW technology to measure components without reducing their mechanical stiffness and its high level of accuracy and robustness opens up many sensing applications.
This article was written by Ryan Maughan, Business Development Director, Transense (Oxfordshire, U.K.). For more information visit here .