

Snails can stably slide across a surface with only a single high-payload sucker, offering an efficient adhesive locomotion mechanism for next-generation climbing robots. The critical factor for snails’ sliding suction behavior is mucus secretion, which reduces friction and enhances suction.
Inspired by this, a team at the University of Bristol’s Bristol Robotics Laboratory proposed an artificial sliding suction mechanism. The sliding suction utilizes water as an artificial mucus, which is widely available and evaporates with no residue. The sliding suction allows a lightweight robot (96g) to slide vertically and upside down, achieving high speeds (rotation of 53°/s and translation of 19 mm/s) and high payload (1 kg as tested and 5.03 kg in theory), and does not require energy during adhesion.
The team demonstrated that the sliding suction is a low-cost, energy-efficient, high-payload, and clean adhesive locomotion strategy, which has high potential for use in climbing robots, outdoor inspection robots, and robotic transportation.
Since suction is generated by a pair of contacting surfaces (i.e., the suction cup and the substrate), friction at the suction interface is the dominating factor in determining if a suction cup can slide. Snails secrete mucus to lubricate the contacting interface and reduce the coefficient of friction (CoF), making sliding movement possible. In addition, mucus can enhance the suction by sealing the gaps between the abdomen and the substrate. Coordinated body movements, in the form of travelling waves, then generate the driving force to slide forward. Other low-viscous liquids, such as water, also reduce friction, which previous studies in contact and friction mechanics have well reported. Replicating the role of snail mucus, the liquid stops the two surfaces making direct contact, acting as a mechanical lubricant, and smooths the microscopic local surface roughness.
In the meantime, the liquid also enhances both suction strength and longevity in comparison with a dry environment. It can be concluded from the above that both friction reduction and suction enhancement can be achieved simultaneously by applying liquid to the suction interface. By mimicking the soft single-sucker structure and the liquid exudation mechanism of the snail, effective sliding suction can be achieved in artificial suction cups and, by extension, suction-based climbing robots.
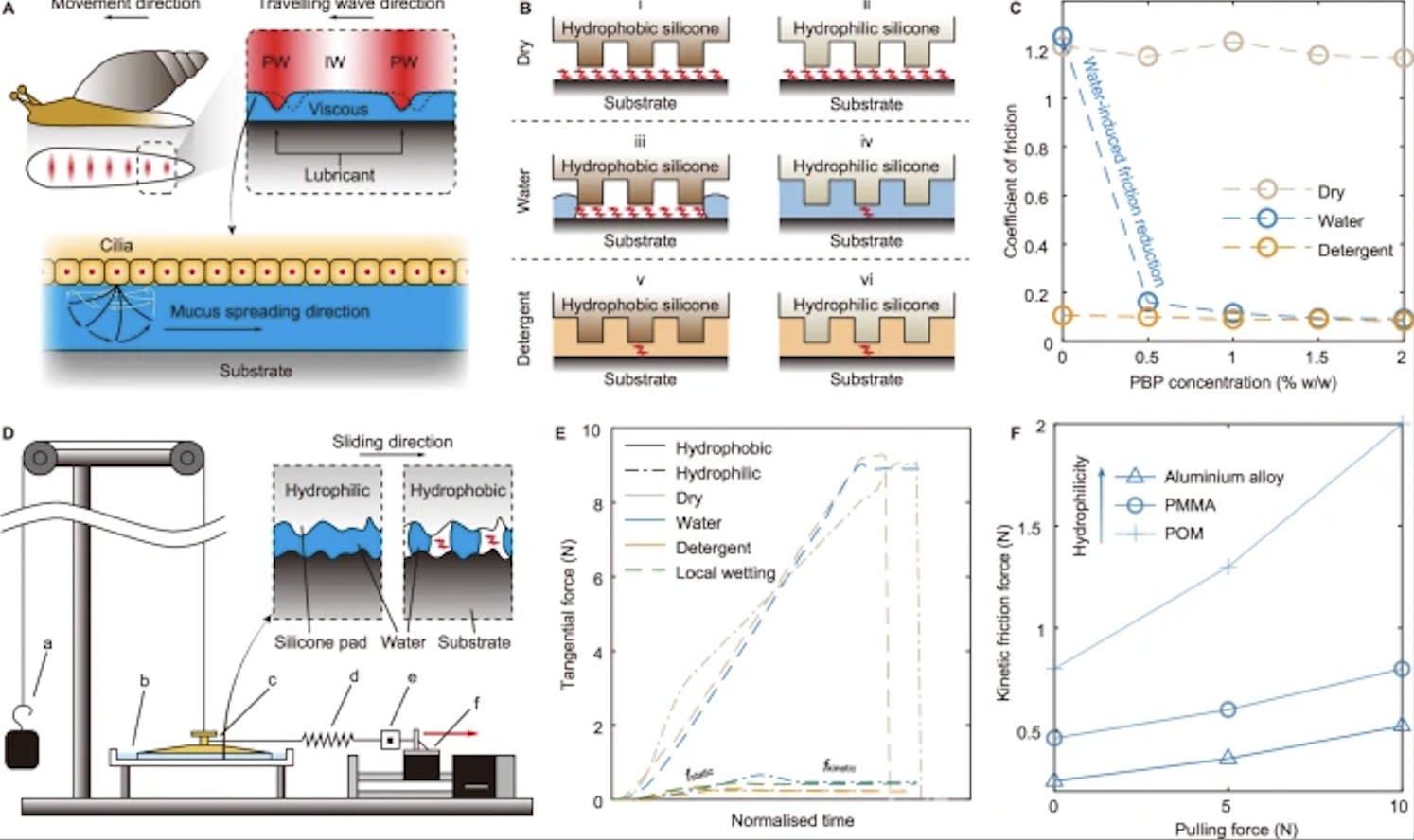
To achieve artificial sliding suction like a snail, the contact interface should be filled with liquid, with no dry-contact areas. Snails spread the mucus to the whole abdomen by cilia beating. Cilia-driven spreading cannot be readily achieved in an artificial suction cup, and therefore a water self-spreading method is employed. Hydrophilic silicone, which is fabricated by adding poly(dimethylsiloxane-b-ethylene oxide) (PBP, a hydrophilic polymer) into the plain silicone, is used as the material of the suction cup’s bottom pad, which generates a strong attractive force to water molecules. Once the hydrophilic silicone contacts with the substrate (the gap is small enough), water spontaneously spreads into the contact interface by capillary action — mimicking the cilia-enabled mucus spreading in the snail — and thus friction is reduced.
In contrast, the plain silicone pad remains naturally hydrophobic and repels water from the interface, even if the hydrophobic silicone is placed on a pre-wetted surface. This is because the instantaneous submergence in water cannot let the tiny air bubbles trapped in the silicone surface disappear; therefore, these bubbles still remain between the silicone and the substrate, making the interface more like a dry contact and generating a high friction force. Alternatively, the silicone pad could be left hydrophilic and a detergent solution could be used, which exhibits strong attractive force to a wide range of surface materials, as the lubricant. However, the detergent solution lubricates both hydrophilic and hydrophobic silicone, making it difficult to utilize the friction difference between the hydrophilic silicone (used as the suction cup bottom) and hydrophobic silicone (used later as drive wheels in the robot). In addition, the detergent solution is more expensive and less readily available than water and will leave a residue upon drying.

Here is an exclusive Tech Briefs interview, edited for length and clarity, with Lead Author Tianqi Yue.
Tech Briefs: What was the biggest technical challenge you faced while developing this snail-inspired robot?
Yue: The biggest challenge was to allow a suction cup to slide on the substrate. A stereotype is that a regular suction cup can only statically stay on the wall, ceiling, or ground. When we try to pull (parallel to the surface) a suction cup that is already attached to a surface, it often remains firmly adhered to the surface. Even when the pulling force exceeds a certain limit, the suction cup will suddenly lose its adhesion and detach from the surface.
However, the behavior of snails defies this common sense: snails can slide effortlessly on the surface while maintaining their strong suction with their abdomens. In this work, we have learned from the biological structure of snails their ability for "sliding suction," overcoming "suction cups cannot move."
Tech Briefs: Can you explain in simple terms how it works?
Yue: First, we realized that the "suction" and "sliding" of a suction cup are actually two nearly independent behaviors. Under appropriate conditions (as seen in snail behavior), a suction cup can freely slide on a surface while maintaining suction. The reason why an ordinary suction cup cannot slide is due to the strong static friction between the bottom of the suction cup and the contact surface. Snails secrete mucus, preventing direct contact between the suction cup (i.e., their abdomens) and the surface, thus reducing friction.
At the same time, the secreted mucus enhances suction adhesion. Therefore, we can achieve a similar sliding suction capability by introducing a liquid at the contact interface between an artificial suction cup and the surface. In our case, we used water. Of course, technically, we needed to make some special modifications to the suction cup, the details of which can be found in our published paper.
Tech Briefs: What kinds of applications could this be applied to?
Yue: The sliding suction robot has a wide range of applications. Compared to traditional climbing robots, it offers a lower energy consumption and higher payload capacity for robot climbing. For instance, a sliding suction robot powered solely by batteries can carry many tools and perform cable-free work on surfaces that are difficult for human access, such as the exteriors of skyscrapers, the shells of large equipment, wind turbine blades, underwater hulls of ships, and more.
Tech Briefs: How soon could we see it applied?
Yue: I think the day when this technology becomes widespread is not far off. The technology itself is not difficult to replicate, but we need to carry out special optimization designs for the robot tailored to specific application scenarios, before its practical application. For example, the current version of the robot can only be applied on smooth surfaces like glass. If it needs to be used on rough surfaces, additional auxiliary designs will be required.
Tech Briefs: What are your next steps? Do you have set plans for the further work/research/etc.?
Yue: Our next step will be its practical application.