
“Fish are very efficient,” explained Xiaobo Tan, an assistant professor of Electrical and Computer Engineering. “They can perform very efficient locomotion and maneuvering in the water.”
Tan is developing electronics so the devices can navigate and communicate in their watery environment. The team is designing the fish to be inexpensive so they can be used in various applications like sampling lakes, monitoring aquafarms, and safeguarding water reservoirs.
“With these patrolling fish we will be able to obtain information at an unprecedentedly high spatial and temporal resolution,” said Elena Litchman, an assistant professor of Zoology. Such data are essential for researchers to have a more complete picture of what is happening under the surface as climate change and other outside forces disrupt the freshwater ecosystems. It will bring environmental monitoring to a whole new level.”
“As air temperature increases, the lakes and reservoirs also heat up,” Litchman continued. “Increasing water temperature creates strong stratification within the various layers of the water and this may lead to increased growth of harmful algae. Some of these algal blooms create poor conditions for fish and exude toxins that also endanger people.”
To mimic how fish swim and maneuver, Tan builds “fins” with electro-active polymers that use electricity to change shape. Similar to real muscle tissue, ion movements twist and bend the polymer when voltage is applied. The effect also works in reverse – slender “feelers” could signal maneuvering circuits in a sort of electro-active central nervous system. Infrared sensors also could be used for “eyes” to avoid obstacles.
The robots will communicate wirelessly with a docking station after surfacing at programmed intervals and could be linked to other robotic fish for coordinated maneuvers or signal relay. GPS technology and inertial measurement units will allow precise navigation.
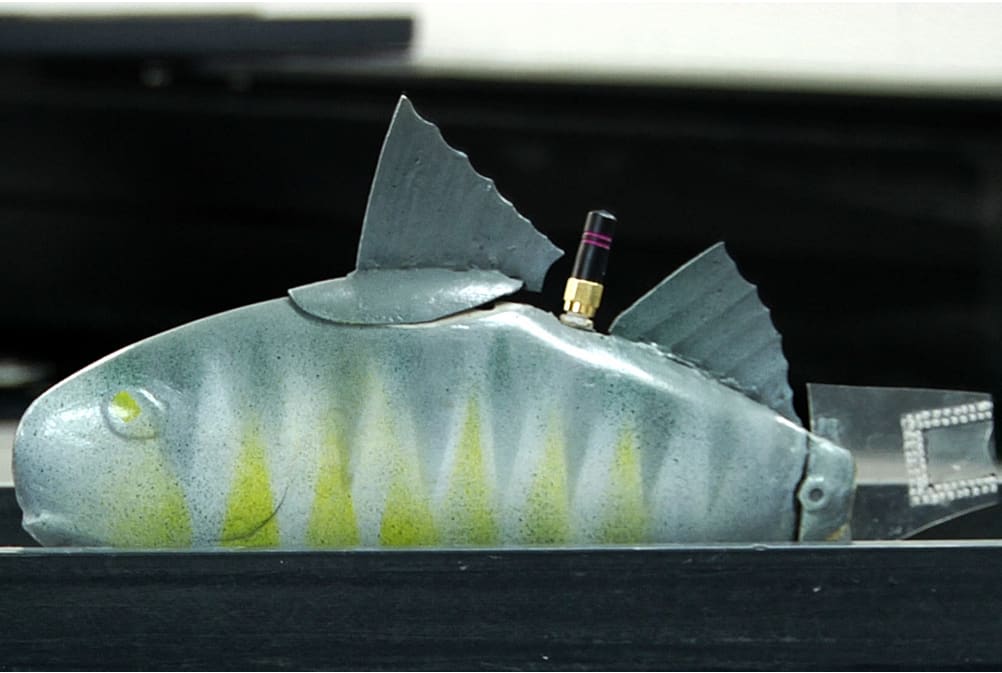
A 9-inch prototype now swimming in Tan’s laboratory tank isn’t strong enough to resist stiff currents, so for now must be confined to relatively still waters. Future versions will incorporate the ability to change buoyancy to assist locomotion and maneuver.
Check out the team's technology in the video below:
Transcript
00:00:03 alal blooms they produce toxins basically by living in Water by growing in water they deteriorate water quality there is a proliferation of harmful algal blooms in freshwater ecosystems so that water will become a very limiting resource worldwide fish as we all know they are very efficient highly maneuverable and we want to build robots that can
00:00:33 basically at least have similar uh capabilities and we have been trying very hard to link the robots to uh real world applications in this case environmental monitoring currently our monitoring uh approaches are not as advanced regular aquatic scientists they go out in the boat they dip their equipment in they look for ALG and so you can cruise around the lake for maybe
00:01:03 once a day we're limited by uh Manpower by Time by energy so and our spatial and temporal coverage of these harmful s bacteria is not adequate for example if the wind blows in One Direction there may be an aggregation of these Cy bacteria in one part of the lake and we may not be aware of it if we don't have good monitoring systems we'll be able to to detect uh nearly in real time the
00:01:33 distribution of these harmful cyen bacteria right now these robots as you can see in this lab they can move and swim in this uh very calm tank but uh we need uh Advance a few Technologies to make them to uh resist disturbances reasonable disturbances in Lakes the materials that use to drive the robotic fish are called Electro active polymers also known as artificial muscles so
00:02:04 these are uh polymeric materials uh with active ions inside when we apply a voltage actually you can bend the material or deform the material uh in other ways so that they can behave like artificial muscle in this case we call artificial things to really producing materials that that can perform uh three-dimensional complex uh shape changes not just doing bending but also
00:02:31 can twist can cup so that can mimic fish FS to move through the water very quickly and efficiently is to really make a robot to autonomously operate which means without human intervention uh that requires coordination of all kinds of electronic components inside and also to uh accommodate the actual disturbances or other unpredictables in real environments Envision School tools
00:03:00 of fish that are outfitted with these diverse sensors and it is very exciting because you can monitor temperature distribution you can monitor oxygen distribution and you can monitor concentrations of these harmful algae at first it was like science fiction and then I think it's going to be a reality