
A low-power capacitive proximity sensor has been developed as a prototype of wheel-contact sensors for a small robotic vehicle. The sensor is integrated into a wheel and consists of only a few components that add very little mass to the wheel. The output of the sensor serves as an indication of contact with (or proximity of) the ground; this output can be used as feedback for a vehicle control system. An important aspect of the circuit design is the use of capacitive (instead of slip-ring) coupling between the sensor circuit and associated external circuitry; in comparison with a slip ring, a capacitive coupler is more reliable, less electrically noisy, lighter in weight, and less mechanically complex.
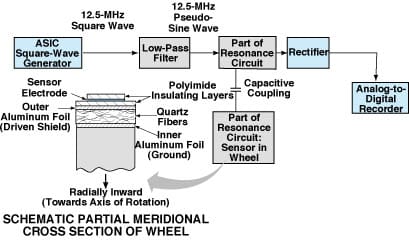
The sensor includes an inner aluminum foil ring covered by a layer of quartz glass fibers, covered in turn by an outer aluminum foil ring, over which are wrapped a ring of polyimide sheet and then a narrower ring of metallized polyimide sheet. The innermost aluminum foil ring acts as electrical ground. The outer aluminum foil ring acts as a driven shield, which is excited in phase with the sensor electrode described next. The metal layer on the metallized polyimide sheet serves as the capacitive sensor electrode, which is part of an inductor/capacitor/resistor circuit that resonates at a frequency of 11 MHz in the absence of nearby objects.
Proximity of the ground or an obstacle manifests itself through the effect of the ground or obstacle material on the capacitance of the sensor electrode. Typically, contact with the ground or an obstacle causes the capacitance to change by an amount between 0.3 and 1.3 pF. The change in capacitance causes a change in the resonance frequency and thus a change in signal amplitude along the slope of a voltage-vs.-frequency resonance curve at a suitable measurement point in the sensor circuit. The voltage is sampled at the measurement point and converted to a dc output voltage, which is then digitized for further processing by the vehicle control system.
This work was done by R. Scott Cozy, Brian Wilcox, and Mike Newell of Caltech and John Vranish of Goddard Space Flight Center for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.nasatech.com/tsp under the Electronics & Computers category.
NPO-20787
This Brief includes a Technical Support Package (TSP).
Integrated Capacitive Wheel-Contact Sensors
(reference NPO-20787) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents an innovative development in the field of capacitive sensing technology, specifically focusing on integrated capacitive wheel-contact sensors designed for use in robotic vehicles. Developed by a team from NASA's Jet Propulsion Laboratory, including R. Scott Cozy, Brian Wilcox, Mike Newell, and John Vranish, this technology aims to enhance the performance and reliability of robotic systems, particularly in challenging environments.
The core functionality of the capacitive wheel-contact sensor is based on the principle of capacitance change due to proximity to the ground or obstacles. When the sensor comes into contact with the ground or an obstacle, the capacitance of the sensor electrode changes by an amount typically ranging from 0.3 to 1.3 picofarads (pF). This change in capacitance leads to a corresponding shift in the resonance frequency, which is detected as a change in signal amplitude on a voltage-vs.-frequency resonance curve. The voltage is then sampled at a designated measurement point, converted to a direct current (DC) output voltage, and digitized for further processing by the vehicle's control system.
One of the key advantages of this sensor technology is its low power consumption and lightweight design, which are critical for mobile robotic applications. The integration of the sensor into the wheel design reduces mass and complexity, making it adaptable to various wheel sizes. The document also highlights the replacement of traditional slip-rings with capacitive coupling, which simplifies the design and enhances reliability.
The technical disclosure emphasizes the sensor's potential applications in various robotic systems, particularly those used in space exploration and other remote environments where traditional sensors may fail due to wear or environmental conditions. The document is part of NASA's ongoing efforts to innovate and improve technologies that support robotic missions.
Overall, this integrated capacitive wheel-contact sensor represents a significant advancement in sensor technology, offering a robust solution for detecting proximity and enhancing the operational capabilities of robotic vehicles. The work is documented under NASA's New Technology Report NPO-20787 and is intended for dissemination through technical briefs to promote further research and application in the field.