
The Picosat and Uninhabited Aerial Vehicle Systems Engineering (PAUSE) project is developing balloon-borne instrumentation systems as aerobots for scientific exploration of remote planets and for diverse terrestrial purposes that can include scientific exploration, mapping, and military surveillance. The underlying concept of balloon-borne gondolas housing outer-space-qualified scientific instruments and associated data-processing and radio-communication equipment is not new. Instead, the novelty lies in numerous design details that, taken together, make a PAUSE aerobot smaller, less expensive, and less massive, relative to prior aerobots developed for similar purposes: Whereas the gondola (including the instrumentation system housed in it) of a typical prior aerobot has a mass of hundreds of kilograms, the mass of the gondola (with instrumentation system) of a PAUSE aerobot is a few kilograms.
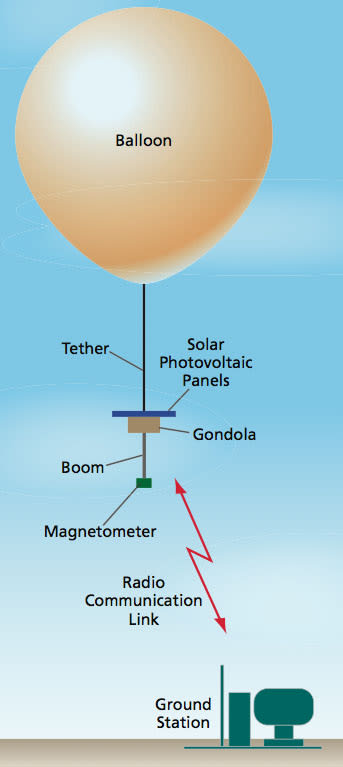
One of the instruments is a magnetometer. To isolate the magnetometer sensor head from magnetic fields generated by other equipment, the magnetometer sensor head is mounted at the outer end of 0.8-m-long fiberglass boom that extends from the gondola. Also mounted on the boom are an external-temperature sensor and a downward-looking electronic camera containing a complementary metal oxide/semiconductor (CMOS) image sensor.
The gondola houses the magnetometer boards; two other CMOS imagers (one aimed upward, the other aimed horizontally); a spread-spectrum radio transceiver operating at a nominal carrier frequency of 900 MHz; a flash electronic memory having a capacity of 1GB; a single-board computer; a pressure sensor; lithium primary batteries in one configuration or solar photovoltaic panels (on top of the gondola) and lithium-ion rechargeable batteries in the other configuration; a battery-current sensor; a serial multiplexer; voltage converters; a Global Positioning System (GPS) receiver; and an inertial measurement unit (IMU) that consists of accelerometers, gyroscopes, and magnetometers for all three coordinate axes.
The single-board computer takes temperature, pressure, IMU, battery current and voltage, and GPS readings at time intervals of one second. The magnetometer data are read at a repetition rate of 4 Hz, and an average of four successive readings is recorded every second. The cameras are set to automatically acquire images at intervals of five minutes, but they can also be commanded to acquire images at any time. The data (including digitized images) are both stored in the flash memory and transmitted via the radio transceiver to a ground station. The data transmissions are programmed to take place at set intervals; in addition, data transmissions can also be commanded at any time from the ground station. The instrumentation system has an average power demand
This work was done by Alberto Behar, Carol A. Raymond, Jaret B. Matthews, Fabien Nicaise, and Jack A. Jones of Caltech for NASA’s Jet Propulsion Laboratory. For more information, download the Technical Support Package (free white paper) at www.techbriefs.com/tsp under the Mechanics/Machinery category. NPO-42737
This Brief includes a Technical Support Package (TSP).
Advanced Aerobots for Scientific Exploration
(reference NPO-42737) is currently available for download from the TSP library.
Don't have an account?
Overview
The document titled "Advanced Aerobots for Scientific Exploration" (NPO-42737) from NASA's Jet Propulsion Laboratory (JPL) outlines the development and capabilities of advanced aerobot technology aimed at enhancing scientific exploration and various applications, including commercial and defense sectors.
The Mars Micro-Aerobot is a key focus of the document, featuring a gondola that houses essential instruments and support hardware designed by JPL. This aerobot operates beneath a helium zero-pressure balloon, which is 12 meters in diameter and can carry a gondola weighing up to 15 kg for 24 hours. The gondola is equipped with a range of sophisticated instruments, including magnetometer boards, CMOS imagers, a radio modem, flash data storage, a single-board computer, and various sensors (pressure, current, temperature, and GPS). The design includes a 0.8-meter fiberglass boom that isolates the magnetometer from the gondola, enhancing measurement accuracy.
The aerobot's capabilities allow it to gather in-situ scientific data and deliver packages to planetary surfaces, making it a versatile tool for exploration. The onboard systems are designed for efficiency, with the single-board computer processing data at regular intervals and the cameras capturing images automatically or on command. Data is stored on flash memory and transmitted to the ground via radio, ensuring real-time communication and data retrieval.
Additionally, the document discusses a broader initiative to develop small (<3 kg) sensing packages that can support a variety of applications, from planetary reconnaissance to monitoring geophysical phenomena like volcanic activity. These systems are characterized by their low-cost, low-power consumption, and lightweight design, making them suitable for deployment in diverse environments. The emphasis is on centralized processing, efficient power conversion, and autonomy to optimize data collection while conserving resources.
Overall, the document highlights the innovative approaches being taken in aerobot technology, showcasing their potential to significantly advance scientific exploration and provide critical support for surveillance and security efforts. The advancements in this field promise to enhance our understanding of planetary environments and improve the effectiveness of various applications in space and terrestrial contexts.