
An alternative method of controlled shifting of the center of mass has been proposed as a means of locomotion of a robot that comprises mostly a payload inside a hollow, approximately spherical shell. The method would be applicable to robots that include rigid, semirigid, or flexible inflated shells, including those of the "beach-ball rover" type, variants of which have been described in several previous NASA Tech Briefs articles.
A prior method, to which the method now proposed would be an alternative, was described in "'Beach-Ball' Robotic Rovers" (NPO-19272), NASA Tech Briefs, Vol. 19, No. 11 (November 1995), page 83. To recapitulate: Three diametral tethers approximately perpendicular to each other would be attached to the shell, effectively defining an approximate Cartesian coordinate system within the shell. A control box containing motors and power and control circuits would move itself along the tethers and adjust the lengths of the tethers in a coordinated fashion to shift the center of gravity and thereby cause the shell to roll in a desired direction.
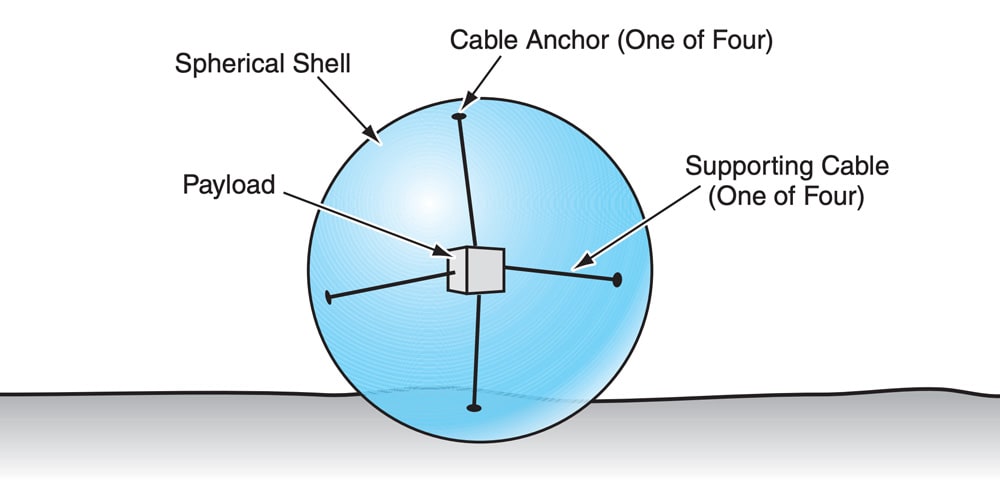
The method now proposed calls for suspending a payload by use of four or more cables that would be anchored to the inner surface of the sphere. In this method, the anchor points would not be diametrally opposite points defining Cartesian axes. The payload, which includes the functional analog of the aforementioned control box, would contain winches that would shorten or lengthen the cables in a coordinated manner to shift the position of the payload within the shell.
In a typical case, the locomotion system would include four cables anchored at approximately the corners of a regular tetrahedron (see figure). Optionally, one could use more than four cables for redundancy against potential failure and/or as a means of distributing the weight of the payload to multiple anchor points to reduce localized stress on the spherical shell. The arrangement of anchor points would not be critical as long as they defined at least three different axes of motion in at least two different planes; hence, the proposed method would afford robustness of motion control in the face of deformation of the spherical shell.
Simple wires could be used to connect the payload to any sensors mounted on the outer or inner surface of the shell. The wires would have to be long enough to reach the maximum distance, and would have to hang slack when the distance was less. Because there would be little rotation between the payload and the spherical shell, it is unlikely that the wires would become tangled; however, one might wish to include spring-loaded retractors to minimize the probability of entanglement.
In the case of a flexible shell, all the cables supporting the payload could be retracted or extended to some extent to increase or decrease, respectively, the pressure of gas inside the shell. Another option would be to include spring loaded supporting cables not connected to winches, in addition to those that were connected to winches; this option may make it possible to reduce the number of winches while obtaining an adequate range of motion.
Yet another option would be to use rigid rods and linear actuators instead of cables and winches. However, rods and linear actuators would probably weigh more than would cables and winches. Moreover, this option would not be compatible with a flexible shell.
This work was done by James Lux of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free online at www.techbriefs.com/tsp under the Mechanics category. NPO-30491
This Brief includes a Technical Support Package (TSP).
Alternative Way of Shifting Mass To Move a Spherical Robot
(reference NPO-30491) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines a novel technology developed at the Jet Propulsion Laboratory (JPL) for robotic locomotion, specifically focusing on a method to propel spherical robots, which may be inflatable. The innovation addresses the challenges associated with moving spherical robots across planetary surfaces, particularly in overcoming obstacles. Traditional methods have relied on carts or off-center masses to shift the center of gravity, which complicates the connection of surface-mounted sensors and equipment to the payload.
The proposed solution involves a unique mechanism where the payload mass within the spherical shell is moved using winches and cables. This design allows for more effective navigation and control of the robot, enhancing its ability to traverse various terrains. The technology is particularly suited for applications in surveillance and potentially in recreational devices, capitalizing on the novelty of the spherical design.
The document also discusses the commercialization potential of this technology, highlighting its applicability in markets such as robotic locomotion for surveillance and hazmat handling. The innovation is noted for its high gross margins, as the cost of hardware does not directly correlate with the price consumers are willing to pay for its use. Additionally, the technology is positioned as an improvement over existing inflatable rovers, like JPL's "tumbleweed," by offering a more adaptable locomotion system.
While the technology is still in the development phase, with plans to build a prototype, there are intentions to submit a paper for publication in a future conference or journal. The document indicates that no disclosures have been made under a Non-Disclosure Agreement (NDA), and there are no current applications of the technology outside of JPL.
Overall, this innovation represents a significant advancement in robotic mobility, with potential implications for both scientific exploration and commercial markets. The document serves as a technical disclosure, providing insights into the development process, potential applications, and future directions for this promising technology.