
As robotic systems are expected to perform complex tasks, system developers require tools for application programming that are more advanced than the current state of the art. Robot application programs need to allow the system to respond to different, and possibly unforeseen, situations either autonomously or by enabling operators to modify these programs quickly in the field.
The RTC facilitates automated robot task planning in a networked environment wherein one or more robots are controlled over a network transport layer (NTL) by multiple computing devices. The RTC is designed to support multiple network protocols.
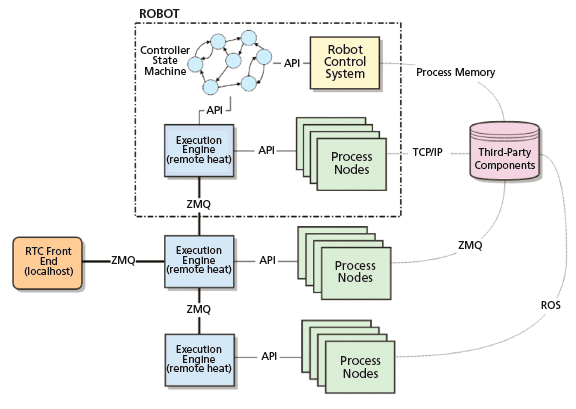
The script engines used by the RTC may reside on different computers on the network. Each script engine can send trigger commands to other script engines as a set of coordinated state machines executing in parallel. In such an environment, the GUI allows a user to understand, at a glance, precisely what is occurring throughout the various distributed script engines. Also, the distributed approach allows for computational load across the network to be balanced if particular library scripts or sequence blocks are particularly intensive.
The RTC uses script blocks that are specifically written to accept input data from a robot, and/or sensor data being published over the NTL, as well as to publish output data to the NTL itself. Upon composition in the GUI of the RTC, the scripts must be written abstractly, i.e., agnostic to any specific input/output (I/O) data bindings. In such a way, each individual script block only knows about the type of information, e.g., joint positions, joint velocities, image coordinates, etc., and not the specific source of that information. It is left to the user to bind the sources and sinks of this I/O data in the VPL using an intuitive graphical interface when composing code blocks in task sequences and/or applications. Thus, central to the present approach is the ability to use and reuse such abstract functionality in the form of library scripts, in different applications, while possibly connecting to different hardware devices.
This work was done by Dustin R. Gooding of Johnson Space Center, Stephen Hart of General Motors, and John D. Yamokoski, Brian J. Wightman, and Duy “Paul” Dinh of Oceaneering. For further information, contact the JSC Technology Transfer Office at (281) 483-3809. MSC-25632-1