Stories
0
5370
30
Briefs: Photonics/Optics
This imaging technique could impact optical communications and signal processing.

Briefs: Sensors/Data Acquisition
This work could accelerate the development of flexible electronics.

Briefs: Materials
The lasers are small and efficient enough to fit on a microchip.
NASA Spinoff: Test & Measurement
Technology used to search for extraterrestrial life can characterize radioactive material.
Briefs: Transportation
Applications include homeland security, vehicle anti-collision systems, telecommunications systems, and industrial instrumentation.

Briefs: Electronics & Computers
This method could lead to the transmission of data at the rate of 100 gigabits per second.
5 Ws: Manufacturing & Prototyping
The handheld 3D skin printer can deposit sheets of skin to cover large burn wounds

Briefs: Communications
Housed in a chip, it lets IoT devices communicate with existing WiFi networks.
Briefs: Manufacturing & Prototyping
The basis for the technology is a special resin that can be cured with UV light.

Special Reports: Communications
RF & Microwave Electronics - April 2020
In this compendium of recent articles from the editors of Aerospace & Defense Technology and Tech Briefs, read about how advances in RF electronics are enabling new applications in space and ground...Blog: Manufacturing & Prototyping
Bridget Pelaez spoke to Tech Briefs about the 1,000 face shields being printed for Florida hospitals.

Blog: Sensors/Data Acquisition
A reader asks our expert.

INSIDER: Mechanical & Fluid Systems
A small, inexpensive, and highly accurate gyroscope, developed at the University of Michigan, navigates without GPS. The key to making the gyroscope is a nearly symmetrical mechanical resonator...

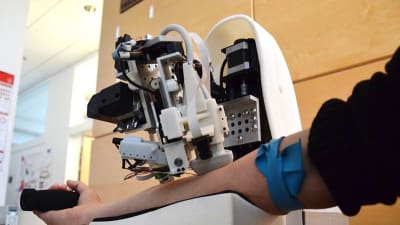
INSIDER: Motion Control
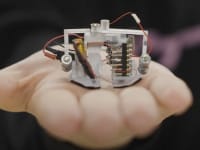
Rutgers University engineers have created a tabletop device that can draw blood or insert catheters to deliver fluids and drugs. The device can accurately pinpoint blood vessels, improving success...
Blog: Manufacturing & Prototyping
See how Prof. Olaf Diegel built a hands-free door opener.

Blog: Transportation
As autonomous cars collect data on passing pedestrians, cyclists, and license plates, what privacy measures are in place? A reader asks.

Question of the Week: Sensors/Data Acquisition
Would You Use the Pedestrian Audio Wearable System (PAWS)?
Our “5Ws” article in the March issue of Tech Briefs highlights a wearable developed at Columbia University called “PAWS.” The Pedestrian Audio Wearable System detects and locates approaching cars. PAWS then warns the pedestrian in real-time by providing audio/visual feedback via the...
Blog: Manufacturing & Prototyping
3D printing is being used to quickly create life-saving parts and prototypes like masks, shields, and ventilator valves.

Blog: Transportation
A reader asks, "What market drivers need to occur for electric vehicles to be considered an acceptable replacement for vehicles with internal combustion engines?"

Blog: Robotics, Automation & Control
Massive manufacturing bots have evolved into something new — collaborative robots.

Question of the Week: Manufacturing & Prototyping
Would You Use a CurveBoard?
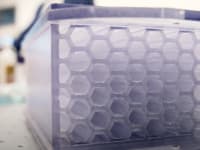
MIT researchers have invented a way to integrate “breadboards” — flat platforms widely used for electronics prototyping — directly onto physical products.
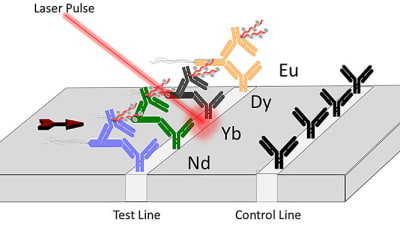
INSIDER: Imaging
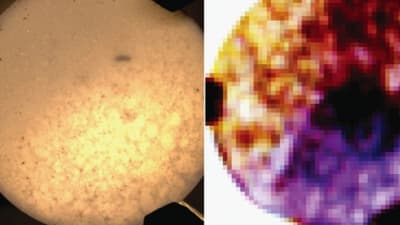
Researchers at Purdue University have been working to develop new technologies to help stop the spread of foodborne illnesses, which kill 3,000 people a year, by detecting them more...
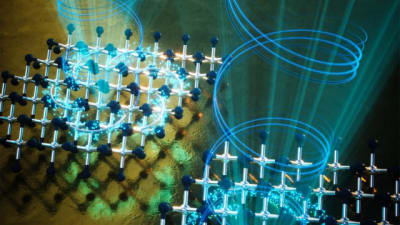
INSIDER: Photonics/Optics
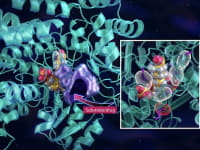
Some molecules, including most of the ones in living organisms, have shapes that can exist in two different mirror-image versions. The right- and left-handed versions can sometimes have different...
INSIDER Product: Photonics/Optics
Final Vision Inspection (FVI) SystemCyberOptics® Corporation (Minneapolis, MN) has launched the Multi-Reflection Suppression™ (MRS™)-enabled 3D MX3000 Final Vision Inspection (FVI) system for memory modules. The launch extends...

INSIDER: Imaging
Researchers at the National Institute of Standards and Technology (NIST) and their collaborators have developed a way to retrofit the transmission electron...

Blog: Aerospace
NASA wants small businesses to help the safe operation of UAVs in airspace.

INSIDER: Automotive
When electric vehicles end their life, the remaining storage capacity of the lithium battery is expected to be higher than 70%. After this, they can be reused for less demanding “second...

INSIDER: Internet of Things
Materials called perovskites show strong potential for a new generation of solar cells, but they’ve had trouble gaining traction in a market dominated by silicon-based...

Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Power
Upcoming Webinars: Power
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure