
Part of the Rover Analysis, Modeling and Simulation (ROAMS) software that synthesizes images of terrain has been augmented to make the images more realistic. [ROAMS was described in "Simulating Operation of a Planetary Rover" (NPO-30722), NASA Tech Briefs, Vol. 28, No. 9 (September 2004), page 52. ROAMS simulates the operation of a robotic vehicle (rover) exploring terrain on a remote planet.] The images are needed for modeling responses of rover cameras that provide sensory inputs for machine-vision-based algorithms for controlling the motion of the rover. The augmented image-synthesizing part of the ROAMS software supports terrain geometry and texture specifiable by the user, CAHV and CAHVOR camera models, and more-realistic shadowing (see figure). (The letters in "CAHV" represent vectors in a standard photogrammetric model of a pinhole camera. Letters O and R in "CAHVOR" represent vectors used to model distortions.) A contemplated future version of ROAMS would support the CAHVORE model, which represents more-general cameras, including those having fish-eye or other wide-field-of-view lenses. (Letter E in "CAHVORE" represents a vector used to model apparent motion of a camera entrance pupil.)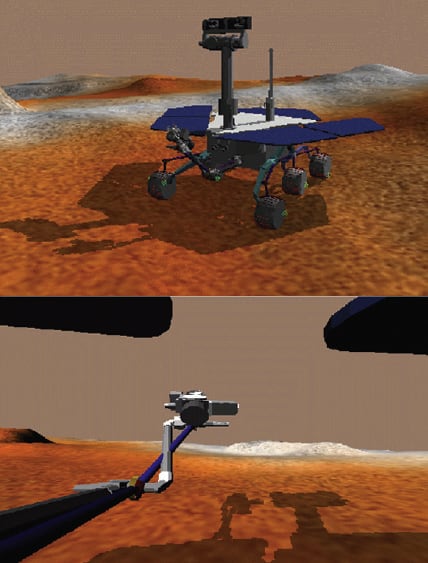
This program was written by Richard Madison, Abhinandan Jain, and Marc Pomerantz of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.techbriefs.com/tsp under the Software category.
This software is available for commercial licensing. Please contact Karina Edmonds of the California Institute of Technology at (626) 395-2322. Refer to NPO-42406.
This Brief includes a Technical Support Package (TSP).
Generating CAHV and CAHVOR Images With Shadows in ROAMS
(reference NPO-42406) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package from NASA's Jet Propulsion Laboratory (JPL) that focuses on generating CAHV (Camera-Attitude-Height-View) and CAHVOR (Camera-Attitude-Height-View-Orientation) images with shadows in the ROAMS (Robotic Operations and Autonomous Mission Systems) framework. It is part of the NASA Tech Briefs, specifically NPO-42406, and aims to disseminate aerospace-related developments that have potential technological, scientific, or commercial applications.
The document outlines the integration of hardware and software components in the Darts Lab, which includes a simulation rover testbed designed for planetary exploration. Key components of the system include a navigator, locomotor, position estimator, and various sensors such as IMU (Inertial Measurement Unit), vision sensors, and navigation sensors. The system is equipped with a decision layer and an onboard software interface that manages vehicle sensors and actuators, facilitating closed-loop control and simulation.
The primary focus of the document is on the simulation of camera responses in planetary environments, which is crucial for mission planning and execution. The ability to generate accurate images that account for shadows is essential for interpreting the terrain and making informed decisions during exploration missions. The document emphasizes the importance of simulating real-world conditions to enhance the effectiveness of robotic missions on other planets.
Additionally, the document provides information on how to access further resources and assistance through the NASA Scientific and Technical Information (STI) Program Office. It includes contact details for the NASA STI Help Desk, encouraging users to explore additional publications related to research and technology in this field.
Overall, the Technical Support Package serves as a valuable resource for understanding the advancements in camera simulation technology and its applications in planetary exploration. It highlights the collaborative efforts of researchers at JPL and the potential for these technologies to impact a wide range of scientific and commercial endeavors. The document underscores NASA's commitment to innovation and the sharing of knowledge within the aerospace community.