
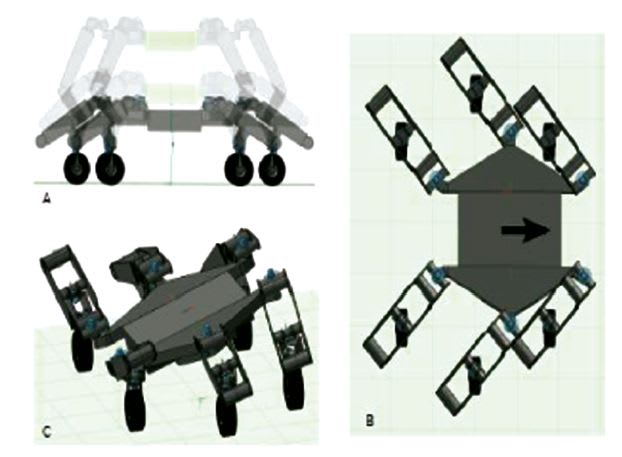
Graphical operator interface methods have been developed for modular, reconfigurable articulated surface systems in general, and a specific instantiation thereof for JPL’s Tri-ATHLETE. The All-Terrain Hex-Limbed Extra- Terrestrial Explorer Robot (ATHLETE) has six limbs with six kinematic degrees of freedom each (see figure).
Until now, JPL has used generic CAD (computer-aided design), simulation, and animation tools as a substitute for a true modular robot operator interface. This workflow is extremely time-consuming, and is not suited for use in an operations context. Current operator interfaces, both at JPL and in the broader exploration robotics community, are largely focused on non-reconfigurable hardware.
Reconfigurable modular hardware such as Tri-ATHLETE promises to extend greatly the capability of future exploration missions for a relatively small additional cost. Whereas existing missions based on monolithic hardware can only perform a limited set of predefined operations, modular hardware can potentially be reconnected and recombined to serve a range of functions. The full realization of these promises is contingent not just on the development of the hardware itself, but also upon the availability of corresponding software systems with algorithms that enable operators to rapidly specify, visualize, simulate, and control particular assemblies of modules. In the case of articulated, reconnectable hardware like Tri-ATHLETE, operators also can determine feasible motions of the assembly, and disconnect/reconnect actions that change assembly topology.
This work was done by Jeffrey S. Norris of Caltech, Marsette A. Vona of Northeastern University, and Daniela Rus of MIT for NASA’s Jet Propulsion Laboratory.
This software is available for commercial licensing. Please contact Daniel Broderick of the California Institute of Technology at
This Brief includes a Technical Support Package (TSP).
Operator Interface and Control Software for the Reconfigurable Surface System Tri-ATHLETE
(reference NPO-47777) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a Technical Support Package from NASA's Jet Propulsion Laboratory (JPL) detailing the Operator Interface and Control Software for the Reconfigurable Surface System known as Tri-ATHLETE. This package, identified as NPO-47777, is part of NASA Tech Briefs and aims to disseminate results from aerospace-related developments that have broader technological, scientific, or commercial applications.
The Tri-ATHLETE system is designed to enhance modular robotics, allowing for flexible and efficient assembly and operation of robotic modules. The document includes various figures illustrating the system's capabilities, such as the assembly of Tri-ATHLETE modules with a central payload pallet. The graphical interface enables users to manipulate the modules through a click-and-drag method, facilitating the design of complex movements like lifting, sliding, and tilting.
One of the key features highlighted is the rapid modeling and assembly of robotic structures. For instance, the document describes how a new mission scenario can be quickly explored by adding additional modules and pallets, demonstrating the system's adaptability. The interface allows for intuitive operation, making it accessible for users to create and manipulate configurations without extensive coding.
The algorithms developed for the Tri-ATHLETE project bridge the gap between general-purpose tools and hardware-specific systems, addressing the limitations of existing technologies. This flexibility is crucial for various applications, including space exploration and other fields requiring modular robotic systems.
The document also emphasizes the collaborative nature of the project, with contributions from individuals like Mark Powell at JPL. It serves as a resource for those interested in innovative technology and partnerships within NASA, providing contact information for further inquiries.
Overall, the Technical Support Package showcases the advancements in modular robotics and operator interfaces, highlighting the potential for these technologies to revolutionize how robotic systems are designed, operated, and utilized in various applications. The Tri-ATHLETE system represents a significant step forward in creating adaptable and efficient robotic solutions for future missions.