
In smooth terrain, the most efficient motion to traverse the terrain is rolling. However, when a wheeled vehicle encounters obstacles, it must circumvent them if possible or choose an alternate path. Legged vehicles can traverse such obstacles by stepping over them, but are not energy efficient on smooth terrain. The Walk and Roll Robot combines walking and rolling capabilities for energy efficient motions. It utilizes a directed flux motor and epicyclical gear bearings to articulate the legs and wheels, which allows for a compact configuration and prevents gear backdrive. This compact design — where all of the components are contained within the body — allows the robot to be utilized for multiple applications, including those with harsh environments in which robots traditionally have difficulty with debris, moisture, or dust. Also, more efficient gaits utilizing walking and rolling have been developed using the Walk and Roll Robot.
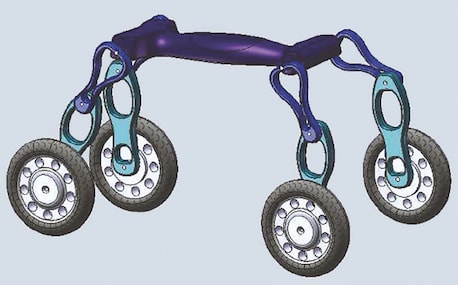
The unit has multiple legs supporting a main body that move it in a forward direction and reverse direction about a base surface. The leg includes wheels to roll along the base surface. A drive assembly, including a motor and drive shafts, independently drives pivotal movement of the hip joint and the knee joint, and rolling motion of the wheels. It can shift its center of mass easily when needed for various movements, and provides good stability during turning at high speed.
The Walk and Roll Robot has various features that increase its robustness, lighten its weight, and increase its overall energy efficiency. These include passive compliance in the leg gearing system and gear bearings, an actuated ball and socket joint to replace the hip joint, and a shaft drive to transfer power from the motor to the legs and wheels. As a result, the robot system has the ability to deal with unexpected bumps in terrain without having to rely solely on an active suspension system. Furthermore, it allows for increased range of motion and a more compact housing.
The shaft drive system is an improvement upon the previous mechanism that transferred power down to the legs and wheels. The new system allows for a spring damper to add passive compliance and shock absorption. It also allows for a significant decrease in weight and size over the previous method and allows for much greater scalability of the design.
This technology could be used for planetary exploration rovers, urban search and rescue missions, traversing harsh terrain for scientific exploration, and military reconnaissance and exploration missions.
NASA is actively seeking licensees to commercialize this technology. Please contact the Strategic Partnerships Office at