
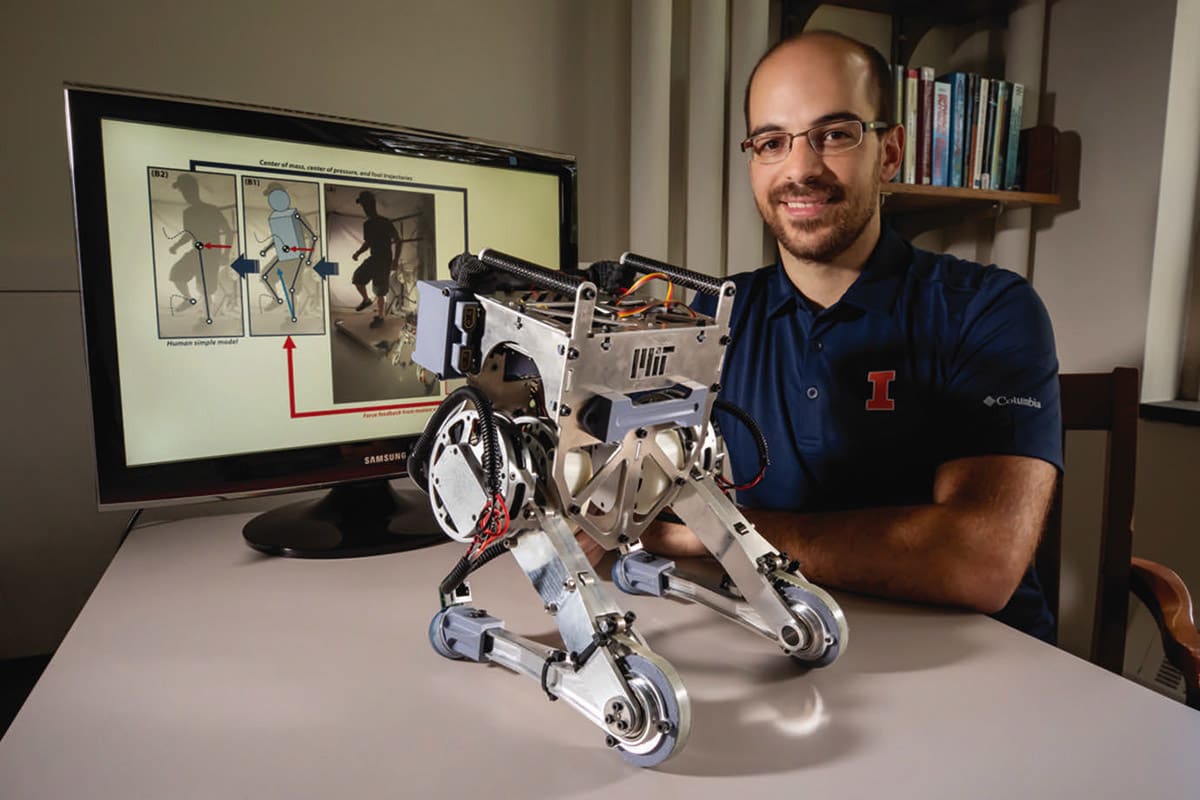
A two-legged robot named Little Hermes was designed with humanlike reflexes and is guided by a person from a remote location who feels the same physical forces the robot is experiencing. The small-scale bipedal robot is designed to go places deemed unsafe for humans.
Much of the current human-operated robotics research does not include any force-feedback information to the operator. If human-assisted robots are going to interact with the environment in a way comparable to humans, operators need to feel the same forces that the robot “feels.” A motion-capture suit — like an exoskeleton worn by a human operator — was developed that captures the operator’s motion and the forces the operator exerts on the environment to move, and transfers that data to the robot, which reproduces the motion with little to no delay.
Since robots do not have an inherent sense of balance like a person does, the researchers fit the operator with a vest that sends force-feedback information from the robot to the operator. If the robot begins to fall, the operator feels a push in that direction through the vest. The operator’s reaction is to take a step to balance themselves and the robot does the same, synchronously, preventing it from tipping over.
Next steps are to improve the teleoperation between the robot and operator, which happens through a wired side-by-side interface. Researchers plan to use wireless technology, similar to what is used to control drones. Also, robot-to-human force-feedback devices to other parts of the body like the feet and hands will be developed. The technology is not constrained to bipedal robots; any of the technology transfers easily to other mobile systems like quadrupedal and wheeled robots.
Watch a demo of the robot on Tech Briefs TV here . For more information, contact Lois Yoksoulian at
Transcript
00:00:06 this work presents a tell operation policy to dynamically synchronize the locomotion of a human operator in the locomotion of a bipedal robot all the motions you see this video are commended in real time by the operators they are not programmed actions to achieve this we capture in locomotion data including torso in feet spatial position as well as the magnitude and location of the
00:00:35 Nets ground contact force we condense this information using a simple model four legged locomotion the linear inverted pendulum which is represented by the line that connects the center of mass and the center of pressure to make the robot dynamically move in synchrony with the operator we first capture human motion trajectory in condensed is data using a dependable model the motion is
00:01:07 fundamentally described by the translation of the center of mass and the center of pressure next we scale the motion of the pendulum model to robot proportions in this work the machine is about one third of human size and substantially lighter finally the robotic eliza's the reference from the simple model to compute contact forces for each foot and reproduce the
00:01:36 movement of the operator additionally a feedback force show new red is applied to the operator to make sure that the human movement is synchronized with the motion of a much smaller and lighter robot this force is proportional to the relative motion velocity between human and robot when human and machine are dynamically synchronized via Italo operation the
00:02:14 operator commends the bipedal robot to take steps in place or even jump these results represent fundamental solutions for mine human motor control intelligence with the physical robustness of robots