
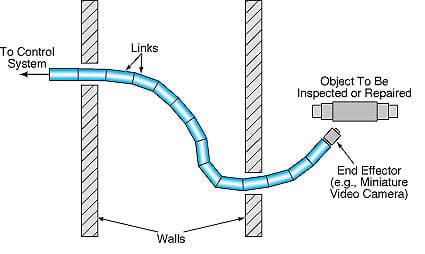
Robots with multiple-link arms that could reach through narrow openings into hidden cavities are undergoing development. Called "multifunction dexterous boro-robots" (MDBRs), these robots would resemble snakes (see Figure 1), in both general appearance and in the slithering motion with which they would negotiate narrow passages. Robots like these could make it possible to inspect, maintain, and repair critical parts in the interiors of complex machines like aircraft engines, without having to take the machines apart and then putting them back together at great expense. Such robots could also prove useful as surgical endoscopic tools. In comparison with currently available borescopes and endoscopes, MDBRs would be more versatile, more controllable, and better able to maneuver around obstacles. The MDBRs would differ from the serpentine inspection robots reported previously in NASA Tech Briefs[see "Small, Lightweight Inspection Robot With 12 Degrees of Freedom" (NPO-19367) Vol. 20, No. 2 (February 1996), page 73 and "Control of a Serpentine Robot for Inspection Tasks" (NPO-19506) Vol. 20, No. 3 (March 1996), page 1b.]
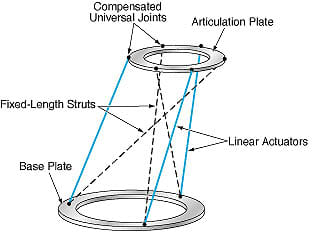
Each link in an MDBR contains linear actuators that are part of a kinematic linkage for controlling the relative orientations of the adjacent links. The kinematic linkage (see Figure 2) includes a base plate at one end and an articulation plate at the other end. The base and articulation plates also serve as the articulation and base plates, respectively, of the preceding and following links. The base and articulation plates are connected by six struts with compensated universal joints at their ends.
Three of the struts are of fixed length and are crossed; three of the struts are the linear actuators and are not crossed. Together, the six struts and the base and articulation plates constitute a truss with a unique configuration and a high strength-to-weight ratio. The configuration of the truss (and thus the position and orientation of the articulation plate relative to the base plate) can be altered by commanding the linear actuators to change their lengths according to the kinematical requirements. The linear actuators could be of any of several types; miniature piezoelectric "inchworm" actuators are particularly suitable.
The individual actuator commands to obtain the overall desired pose and snakelike motion of the arm are generated by a computer that solves the equations for both the forward and the inverse kinematics of the links and of the whole arm. An MDBR is modular in the sense that in principle, any number of links [with the same or different diameter(s) and length(s)] can be added to extend its reach or increase its dexterity. A two-link prototype has been demonstrated. In a practical application, the benefits of increased dexterity and reach would have to be traded off against the increase in the amount of computation needed to solve the inverse kinematical equations for a greater number of links.
This work was done by Yoseph Bar-Cohen and Mohsen Shahinpoor of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.techbriefs.com under the Machinery/ Automation category.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to
Technology Reporting Office
JPL
Mail Stop 122-116
4800 Oak Grove Drive
Pasadena, CA 91109
(818) 354-2240
Refer to NPO-20268, volume and number of this NASA Tech Briefs issue, and the page number.
This Brief includes a Technical Support Package (TSP).
Snakelike robots would maneuver in tight spaces
(reference NPO20268) is currently available for download from the TSP library.
Don't have an account?
Overview
The document discusses the development of innovative serpentine robots, specifically multifunction dexterous boro-robots (MDBRs), created by Yoseph Bar-Cohen and Mohsen Shahinpoor at NASA's Jet Propulsion Laboratory (JPL). These robots are designed to maneuver in tight spaces, making them suitable for various applications, including inspection, maintenance, and surgical procedures.
The MDBRs are constructed using a series of parallel actuators connected in a way that allows for high articulation capability. This design enables the robots to reach almost any point within a hemispherical envelope defined by the length of the robot unit. Each robot consists of multiple sections, each equipped with three inter-crossed miniature struts and three independent linear actuators. This configuration provides the necessary dexterity and stability for navigating complex environments.
The document highlights the need for such robots, particularly in the context of aircraft maintenance. As aircraft are used beyond their designed lifespan, they face issues like corrosion and cracking, necessitating effective inspection tools that can access internal structures. The MDBRs can be inserted into concealed areas through small openings, allowing for thorough inspections of critical components such as wings, elevators, and fuel tanks.
Figures included in the document illustrate the design of the serpentine robot arm, which comprises lightweight, rigid links that can be maneuvered through narrow openings. Each link is designed to be less than 1 cm in diameter, covered by a flexible sheath to protect the internal mechanisms. The kinematic linkage in each link provides precise control over the position and orientation of the robot's end effector, which can include tools like miniature video cameras for inspection purposes.
The document also emphasizes the novelty of the MDBR design compared to prior art, showcasing its ability to emulate the dexterity of a snake while operating inside structural cavities and narrow passages. The robots are computer-controlled, enhancing their precision and adaptability in various applications.
In summary, the MDBRs represent a significant advancement in robotic technology, offering solutions for challenging inspection and maintenance tasks in confined spaces, thereby contributing to safety and efficiency in industries such as aerospace and healthcare.