
Stories
51
35
0
1110
30
INSIDER: Robotics, Automation & Control
Most deep sea robotic manipulators are constructed from hard materials that are not geared to collect fragile coral. Researchers at the Wyss Institute, Harvard Paulson School, and City University of...

News: Robotics, Automation & Control
'Mini Force Fields' Power Microbots
Purdue researchers are using "mini force field technology" to independently control individual microrobots operating within groups.
INSIDER: Imaging
For the past year, NASA’s Ames Research Center and Nissan have been collaborating on the development of autonomous driving technologies that could one day be used in future consumer vehicles,...

Briefs: Robotics, Automation & Control
RoboSimian Software System from the DARPA Robotics Challenge Finals
A software architecture to allow semi-autonomous mobile manipulation of highly dexterous robots under degraded communications was developed to enable remote operation of a mobile manipulation robot as a first responder in a disaster-response scenario. The software architecture is...
Briefs: Robotics, Automation & Control
NASA Tensegrity Robotics Toolkit (NTRT)
Tensegrity robots have many unique properties useful for robots intended to operate in natural settings, yet the exploration of how to build and control such robots is just beginning. Many of their positive qualities, such as multipath force distribution, compliance, and their oscillatory nature, also make...
Briefs: Robotics, Automation & Control
Tension-Stiffened and Tendon-Actuated Space Manipulators
The Space Shuttle Remote Manipulator System (SRMS) and Space Station Remote Manipulator System (SSRMS) have proven the benefit of long-reach manipulators, with the reach of both manipulators in the l5-18-m class. Manipulators with greater reach provide many benefits. The SRMS’s limited...
Briefs: Robotics, Automation & Control
Ship Classification Using Gnostic Fields
There are many applications for Autonomous Seaborne Vessels (ASVs). The seaborne cargo shipping industry moves over 9 billion tons of cargo per year, is worth $375 billion, and is responsible for 90 percent of world trade. Autonomous cargo ships could reduce the operating expenses of cargo ships by 44%. ASVs...
Briefs: Robotics, Automation & Control
Robotic Surgical Devices, Systems, and Related Methods
Various advancements have been made in the development of miniature in vivo surgical robots. These robots are designed to perform Laparoendo scopic Single-Site Surgery (LESS). After being inserted through a single incision, these robots can perform surgical procedures in a dexterous workspace....
Briefs: Robotics, Automation & Control
Visual-Aided Inertial Navigation for Computationally Constrained Aerial Vehicles
Micro aerial vehicles (MAVs) are lightweight, highly dynamic vehicles with limited payload, sensing, and computation capabilities. There is significant interest to automate MAVs for military surveillance, reconnaissance, and search-and-rescue missions. The current...
Briefs: Robotics, Automation & Control
Tendon-Driven Finger, Wrist, and Thumb Actuation System
The Robonaut 2 (R2) Dexterous Robot is the result of an effort to build a two-armed, ten-fingered humanoid robot torso capable of assembly work. This invention concerns a multi-fingered hand, and is composed of several parts. One is a tendon-driven, four-link, four-degree-of-freedom robotic...
Briefs: Robotics, Automation & Control
Contact State Estimation for Multi-Finger Robot Hands Using Particle Filters
A method, using a particle filter, has been created for identifying the location, orientation, and shape of an object that a robot hand touches. An appropriate motion model has been defined that characterizes the motion of the robot hand as it moves relative to an object....
INSIDER: Mechanical & Fluid Systems
The Unplugged Powered Suit (UPS), a new model of pneumatic muscle and an active type of assistive equipment incorporating the muscle, is wearable equipment that supports human movement without...

INSIDER: Motion Control
Each of the single-molecule, 244-atom submersibles built at Rice University has a motor powered by ultraviolet light. With each full revolution, the motor’s tail-like propeller moves the sub forward...
Application Briefs: Motion Control
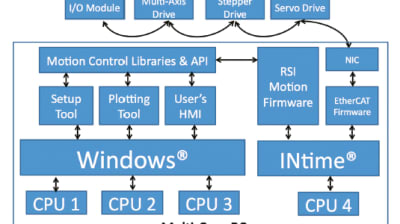
With the increased processing power that PCs have attained, a complex machine that used to require an expensive and dedicated hardware-based motion control...
Articles: Motion Control
A potentiometer sensor is an electromechanical component that consists of a resistor where the voltage divider value can be measured at any position by means of sliding contacts between the...

INSIDER: Green Design & Manufacturing
Machines that are much smaller than the width of a human hair could one day help clean up carbon dioxide pollution in the oceans. Nanoengineers at the University of...

INSIDER: Aerospace
Tow tractors, pushback tractors, tankers, luggage carts, air cargo, and catering vehicles crowd airport aprons. Poor weather conditions impede work on the apron even more. Researchers at the...

INSIDER: Robotics, Automation & Control
Tractor beams are mysterious rays that can grab and lift objects. Now, researchers have built a working tractor beam that uses high-amplitude sound waves to generate an acoustic...
Articles: Aerospace
Compact, Long-Reach Robotic Arm
William R. Doggett, John T. Dorsey, George G. Ganoe, Thomas C. Jones, and Cole K. Corbin, Langley Research Center (Hampton,...

Briefs: Robotics, Automation & Control
The Exoskeleton (EXO) is a device that falls into a new classification of robotics called wearable robots. On-orbit applications include countermeasures and dynamometry, allowing for continual assessment of a...

Briefs: Robotics, Automation & Control
Visualization and Introspection for Teleoperation of Robotic Systems
The Space Exploration and Analysis Simulations (SEAS) project at JPL performs analysis of advanced mission and system concepts on behalf of NASA. One of the concepts being explored involves operation of robotic rovers on the Moon from a remote operator station located either at a...
Briefs: Robotics, Automation & Control
Neutrally Buoyant Tank Inspection and Cleaning Robot
Huge savings in cost and inspection times (as well as improved safety) could be obtained by performing in-service inspection of tank floors and walls with robotic devices. This would have a reduced environmental impact and meet EPA and state regulations.
Briefs: Robotics, Automation & Control
DshellCommon Simulation Framework
DshellCommon software has been developed for specifying and executing generic multibody system simulations. This innovation helps the user create and execute simulations for mechanisms, vehicles, spacecraft, or other systems by making it easier to write simulation “run scripts” for systems that vary from simple...
Briefs: Robotics, Automation & Control
Universal Robotically Operated Leave-Behind Gripper
This universal robotically operated leavebehind gripper allows robotic (or extravehicular activity — EVA) attachment capability of any object at eight existing types of attachments at the International Space Station (ISS). It enables expansion of external stowage and payload sites to include...
Briefs: Robotics, Automation & Control
Autonomous Micro Aerial Vehicle Flight Using Optical Flow and Inertial Cues
Micro aerial vehicles (MAVs) are agile and have unstable flight dynamics. They require a failsafe method to be navigated through areas even without GPS coverage. The approach of this work is to use only the feature matches between two consecutive images, i.e. optical flow...
INSIDER: Robotics, Automation & Control
Engineers Put 'Spring' in Robots' Step
The ATRIAS robot model developed at Oregon State University uses a "spring-mass" walking approach. The natural-gait method gives human-sized bipedal robots the ability to blindly react to rough terrain, maintain balance, retain an efficiency of motion, and walk like humans.
INSIDER: Energy
The propulsion subsystem for NASA's Green Propellant Infusion Mission (GPIM) has been integrated onto the spacecraft, moving the mission another major step toward scheduled launch in...

INSIDER: Nanotechnology
When driving a car, the clutch mechanically carries the torque produced by the engine to the chassis of the vehicle – a coupling that has long been tested and optimized in such macroscopic machines,...
INSIDER: Mechanical & Fluid Systems
The Biomechatronics Group at MIT is using a data-driven approach to study the mechanics and control of human walking, with the goal of applying the findings to hardware control. PhD...

Top Stories
 Blog: Sensors/Data Acquisition
Blog: Sensors/Data Acquisition
Going for Gold in Winter Olympic Curling
 Blog: Energy
Blog: Energy
Batteries that Can Withstand the Cold
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 INSIDER: Design
INSIDER: Design
Advancing All-Solid-State Batteries
 Blog: Data Acquisition
Blog: Data Acquisition
 Blog: Materials
Blog: Materials
Webcasts
 Upcoming Webinars: Software
Upcoming Webinars: Software
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Battery Abuse Testing: Pushing to Failure
 Upcoming Webinars: Transportation
Upcoming Webinars: Transportation
A FREE Two-Day Event Dedicated to Connected Mobility
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Choosing the Right N-Port Strategy: Multiport VNAs vs. Switch...
 Upcoming Webinars: AR/AI
Upcoming Webinars: AR/AI
2026 Battery & Electrification Summit (Online)
 Upcoming Webinars: Mechanical & Fluid Systems
Upcoming Webinars: Mechanical & Fluid Systems
The Over-Engineering Trap: Aligning Custom Equipment Specs with...
























