
A proposed method of calibration of micromachined vibratory gyroscopes would make it unnecessary to test the gyroscopes at known rates of rotation. At present, calibration entails inertial tests in which the gyroscopes are exposed to tumble and rotation maneuvers on multiaxis precise rotation tables, which are expensive. By eliminating the need for the rotation tables, the proposed method could reduce the cost of calibration. Moreover, inasmuch as the number of gyroscopes that a rotation table can hold is limited, the elimination of the rotation tables method would make it possible to test more gyroscopes simultaneously.
The proposed method is based on the unique principle of operation of a micromachined vibratory microscope. This principle involves electrostatic excitation, capacitive sensing, and feedback control of vibrations of a microscopic body designed so that its vibrational modes are affected by the Coriolis force. One of the feedback control signals is a negative feedback signal for generating an electrostatic actuation force that compensates for the Coriolis force. In the proposed method, one would superimpose a simulated Coriolis-force signal on the electrostatic actuation signal.
Because signals representing the real and simulated Coriolis forces would be at the same frequency and phase, the gyroscope circuitry would respond to the simulated Coriolis force in the same way in which it would respond to the real Coriolis force. Hence, rotational testing would not be necessary because one could simply inject the simulated Coriolis-force signal into the feedback control loop to make the vibrations and the associated electronic signals behave as though the gyroscope were undergoing rotation.
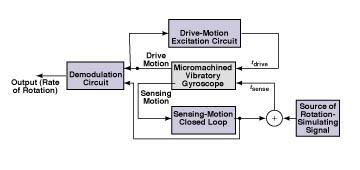
The figure is a block diagram of an electronic system for implementing the method. The drive-motion excitation circuit would measure the drive motion (one of two vibratory motions involved in the basic principle of operation) and would provide an excitation force to sustain this motion. The sensing-motion closed loop would provide electrical damping of the sensing motion (the other vibratory motion involved in the basic principle of operation). The feedback control signal, τsense, would produce an electrostatic actuation force equal to the real Coriolis force plus the simulated (rotation-simulating) Coriolis force. The demodulation circuit would demodulate a sensing-motion force-rebalancing signal with the drive-motion signal to generate a signal proportional to the rate of rotation. During the simulation of rotation, the sensing-motion closed loop and the demodulation circuit would respond as though to a real rotation signal.
Of course, the value of this method of calibration would depend on the accuracy with which the simulated Coriolis-force signals could be made to duplicate the effects of the real Coriolis force. It would be necessary to perform conventional inertial calibration to verify the proposed method.
This work was done by Roman Gutierrez and Tony K. Tang of Caltech for NASA's Jet Propulsion Laboratory.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to
Technology Reporting Office, JPL, Mail Stop 122-116, 4800 Oak Grove Drive, Pasadena, CA 91109; (818) 354-2240.
Refer to NPO-20659
This Brief includes a Technical Support Package (TSP).
Non-Inertial Calibration of Vibratory Gyroscopes
(reference NPO20659) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a novel method for the calibration of micromachined vibratory gyroscopes, developed to reduce the costs and complexities associated with traditional inertial testing methods. Currently, calibration requires exposing gyroscopes to known rates of rotation using expensive multi-axis precision rotation tables. This process is not only costly but also limits the number of gyroscopes that can be tested simultaneously.
The proposed method leverages the unique operational principles of vibratory gyroscopes, which utilize electrostatic excitation, capacitive sensing, and feedback control. The core idea is to simulate the Coriolis force—an effect that occurs when the gyroscope is in motion—by injecting a simulated Coriolis-force signal into the feedback control loop. This signal mimics the real Coriolis force, allowing the gyroscope's circuitry to respond as if it were undergoing actual rotation. Consequently, the need for physical rotation testing is eliminated, enabling a more efficient calibration process.
The document outlines the technical aspects of the proposed calibration method, including a block diagram that illustrates the electronic system's implementation. The drive-motion excitation circuit measures the gyroscope's drive motion and provides the necessary excitation force to maintain constant vibratory motion. The sense motion closed-loop system applies electrical damping to the sense motion, combining the real Coriolis force with the simulated force. This setup allows for the generation of a signal proportional to the rotation rate, effectively testing the gyroscope's response to rotation without the need for traditional inertial calibration.
Additionally, the document highlights the advantages of this method, such as significant cost reductions in calibration and the ability to test multiple gyroscopes in parallel. This innovation is particularly relevant for future NASA missions, where affordability and efficiency in gyroscope technology are crucial.
In summary, the document details a transformative approach to gyroscope calibration that eliminates the reliance on expensive rotation tables, thereby streamlining the testing process and enhancing the feasibility of mass-producing affordable vibratory gyroscopes for various applications.