
A proposed optoelectronic system based on imaging-lidar and differential-altimetry techniques would generate data equivalent to a height map of a surface area. Originally conceived for use in determining spatial-frequency characteristics of ocean waves with high temporal resolution, the system could also be used to generate high-resolution topographical maps of terrain or to study the roughness properties of land areas of geological interest.
The system would include a pulsed laser, an electro-optical modulator serving as an electronic shutter, a high-speed digitizer-and-trigger unit, beam splitters, photodetectors, a computer-and-timing-circuit unit, and two charge-coupled-device (CCD) array detectors. The two CCDs must be radiometrically calibrated and co-registered so that corresponding pixels receive light from the same points in the scene.
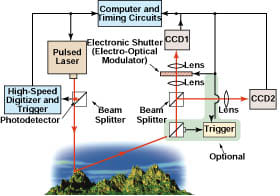
In operation, the system would illuminate the target surface with a short laser pulse, and both CCDs would image laser light reflected from the target surface. However, the electronic shutter would be activated to truncate the optical return to CCD1 at a time, T0, after the initial laser-triggering pulse. With knowledge of the time dependence of the laser-pulse intensity, along with the time dependence of the shutter transmittance, it is possible to compute, for each pixel, the round-trip light travel time (T) corresponding to the local surface height.
For this purpose, T0 is set to some value ≈T, such that the shutter would be in the process of closing just as the optical return pulse reached CCD1. It can be seen that nominally T0corresponds to the mean height of the target surface.
The mathematical model for computing T (and thus the surface height) would utilize the output signals proportional to the received radiant flux integrated over time. For a given surface point and the corresponding pixel on CCD1, this signal would depend on the round-trip and shutter times and is therefore denoted S1(T,T0). On the other hand, CCD2 would integrate the entire return optical pulse, so that the signal from the corresponding pixel of CCD2 would be denoted by S2(T,∞).
Both S1(T,T0) and S2(T,∞) would be influenced by the reflection coefficient of the surface and laser-speckle characteristics. The effect of these unknown factors is eliminated by applying a ratiometric approach:
This function increases monotonically with T0 - T, and can be inverted to compute T[E(S1,S 2)]for each pixel, thus yielding a relief map of the scene with high temporal resolution.
This work was done by Ernesto Rodriguez, Robert T. Menzies, David M. Tratt, and Carlos Esproles of Caltech for NASA's Jet Propulsion Laboratory.
NPO-18812