
New microscopic robots – only a few fractions of a hair in diameter – can be made to walk with standard electronic signals, or more specifically a laser.
The team behind the paramecium-sized robots hopes that the tiny technologies will someday travel through human tissue and blood to support health-monitoring and surgical applications.
"The sky is the limit," Cornell University researcher and professor of physics Itai Cohen told Tech Briefs about the potential for the robots. "They could, for example, crawl up a chemical gradient and attack tumor cells, or travel around Petri dishes searching for neurons and then measure the signaling in these neurons."
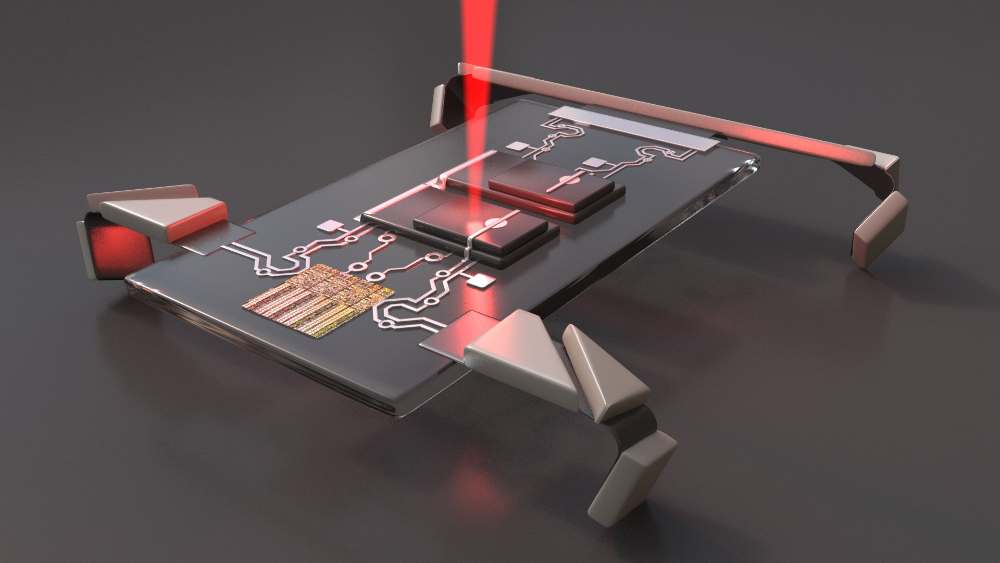
The robots, built using the same kinds of methods employed in computer-chip production, are about 5 microns thick, 40 microns wide, and range from 40 to 70 microns in length. Each nanobot features a simple circuit made from silicon photovoltaics and four tiny electrochemical actuators that function as legs.

The team's micrometer-scale actuator system integrates with semiconductor processing and responds when a laser flashes onto the chip's photovoltaics.
Each photovoltaic cell charges up a separate set of legs. By toggling the laser back and forth between the front and back photovoltaics, the robot walks.
The robots require a low voltage of 200 millivolts and a low power of 10 nanowatts. Because the bots are made with standard lithographic processes, they can be mass-produced: About 1 million bots fit on a 4-inch silicon wafer.
The team used a thin-film production method known as atomic layer deposition to construct legs from platinum strips. The legs, measuring only a few dozen atoms thick, are capped on one side by a thin layer of inert titanium.
The robot's movement comes from a flexing of the material. When a positive electric charge is applied to the platinum, ions force the exposed platinum to expand, making the strip bend but not break.
Additionally, the researchers patterned rigid polymer panels on top of the strips. The gaps between the panels function like a knee or ankle, allowing the legs to bend in a controlled manner and thus generate motion.
Cohen worked with colleague and Cornell professor Paul McEuen, and former postdoctoral researcher Marc Miskin, who is now an assistant professor at the University of Pennsylvania. ( Watch a Cornell University video of Prof. Cohen, explaining the concept of the tiny robots. )
The team’s paper, “ Electronically Integrated, Mass-Manufactured, Microscopic Robots ,” is published in the journal Nature.
The robots provide a template for building even more complex versions that utilize silicon-based intelligence. Cohen and his team are exploring ways to enhance the robots with more complicated electronics and onboard computation.
In a short, edited Q&A with Tech Briefs below, Prof. Cohen explains how the increasingly sophisticated nanotechnology will someday help surgeons and doctors.
Tech Briefs: Your colleague Marc Miskin said in a recent press release, “ I think machines like these are going to take us into all kinds of amazing worlds that are too small to see. ” What is the most exciting application that you envision with this type of technology?
Prof. Itai Cohen: The actuators that we describe in our paper can be controlled by standard electronics. So the vision is that one day soon, we will be able to have on board computer chips that will be detecting environmental signals (e.g., chemicals, light, temperature), make some calculations based on these detected signals, and drive the robotic limbs to respond. Once these capabilities are on board these microscopic robots, the sky is the limit. They could, for example, crawl up a chemical gradient and attack tumor cells, or travel around Petri dishes searching for neurons and then measure the signaling in these neurons.
Tech Briefs: What inspired you to work with such small robots?
Prof. Cohen: What is fun to figure out at the micro-scale is how to build such machines. You can't just order components at your local electronics store, and with some solder or a screw driver put something together. At the microscale the way we make things is through laying down very thin layers of materials on a silicon wafer and then selectively etching the material away in some region of the wafer. That's how all computer chips are made. Here, we add a couple of layers of materials, pattern them, and use ideas from origami to fold up the target 3D structure. So this is a paradigm shift in the way we manufacture machines at this scale. I happen to have a background in origami mechanics and so thinking about this problem was right up my alley.
Tech Briefs: With micro technology, what is more challenging: the construction or the control?
Prof. Cohen: Both aspects of nanotechnology are challenging. The construction requires a lot of trial and error in terms of picking the materials that you need to combine to make the actuators. Once you find the right combination/recipe, however, the advantage of nanotechnology is that it works the same way each time.
Control at this scale is also challenging, especially fine motor control. One thing that we still need to develop to achieve fine motor control are sensors that could give the robot feedback on how hard it is squeezing or pushing against its surroundings.
Tech Briefs: How do you advance a technology — adding electronics to make the robots more sophisticated, for example — while keeping a technology microscopic? That seems like a difficult challenge.
Prof. Cohen: Adding the computer chips is the easy part! 50 years of Moore's law have allowed us to massively shrink the foot print of integrated circuits. My colleagues Paul McEuen and Al Molnar recently figured out how to remove the circuits from the wafer so that in addition to having a very small area, they are also very thin. So, the idea moving forward is to steal all the blue prints for making integrated circuits that functions as clocks, controllers, etc., combine them with our actuator technology, and away we go.
What do you think? Share your questions and comments below.
Transcript
00:00:00 uh we have a paper coming out on the mechanics of origami and I thought I'd tell you a little bit about the general strategy that we have and how we're thinking about this uh this field uh the particular paper that we wrote in science deals with uh the mura Ora uh fold uh this uh is basically a series of parallelograms um that uh when folded into a sheet of paper give that paper
00:00:28 some mechanical properties uh that are determined by the fold patterns that we put in to the paper itself the nice thing about this uh strategy for giving materials uh mechanical properties is that by changing the fold patterns for example I can give the paper a different effec of stiffness I can also introduce new novel mechanical properties for example um if
00:00:55 I take a banana and I just squish it in my hand that banana is going to squirt out the other ends but this particular p pattern if I expand it in One Direction expands in the other direction and if I contract it it contracts in the other direction okay so it has what's known as a negative plusone ratio and that sort of speaks to what's so amazing about these materials we can program in
00:01:17 folding patterns that determine the mechanical properties and give us new properties like this negative plus on ratio that we couldn't get with materials uh um on their own the paper that we wrote also highlights another feature which is that you can program this m ori's stiffness and the way I do that is by introducing pop through defect so I take one of these
00:01:42 vertices and I pop it through okay you can kind of see that on this side here all right the sheet is no longer um quite as flat as it used to be but the amazing thing about this is that whereas before so if I don't have the pop through defect I could fold the sheet pretty easily when I do have that pop through defect that sheet cannot fold any further it becomes stiffer and by
00:02:04 arranging these pop through defects on my sheet I can uh effectively tune the mechanical properties so this is a form of programmable matter where we can not only um fix one pattern and get one set of mechanical properties but we can change that pattern on the Fly uh but origami is this sort of vast world of of uh folding patterns which give all sorts of interesting mechanical
00:02:37 behaviors uh I could imagine making a machine um out of this uh sort of fold over here where I have an actuator um just by squeezing in uh on the inside uh over here I'm getting this pattern to stretch out on the outside and so this brings up the basic question of what is our Global strategy for these origami materials um just by designing their
00:03:06 patterns we can make anything from unique mechanical properties to switches this is an example of a square twist where if I pull uh I can unfurl it but if I just push it a little bit you can see it snaps into place and that's an example of a switching pattern right you pull you pull you don't get anything but you pull hard enough and eventually it opens okay okay um so these Mechanical
00:03:33 Devices we can now think of implementing them but probably not on the paper scale I uh and my colleagues would really like to think about implementing these on smaller and smaller scales what happens if we could make um these kinds of structures out of gel sheets that are only a micron thick what happens if we start making these patterns out of graphine so that's the thinnest sheet
00:03:59 that you could ever possi POS uh do origami on and the idea here is that when you get to smaller length scales uh it's often difficult to do the same things that that we take for granted on large scale so for example if I was to build a robot on a macroscopic scale I might take cloth from somewhere U maybe a steel chain maybe a metal rod or some wood and construct appendages um but on
00:04:26 the Nano scale getting this variety of materials is often prohibitive it's often very difficult to do that our thought is can we start instead of trying to take different materials can we start with the same material something like graphine and then by folding it or cutting it into different shapes could we give it new mechanical properties based on the folded and cut
00:04:51 patterns and in that way make the different materials that we need for our nanoscale robot that's the idea um um and uh I hope I've conveyed you know just how much fun these patterns are um and the the range of possibilities that uh that we have for working with them