
40
-1
120
30
Briefs: Mechanical & Fluid Systems
A prototype version could be demonstrated on a large cargo lunar lander.

Briefs: Robotics, Automation & Control
A new type of control system may broaden robots’ range of tasks and allow safer interactions with people.
Briefs: Automotive
The tiny device accurately measures acceleration in smaller navigation systems and other devices.

Briefs: Motion Control
Hundreds of drones can recharge autonomously on unmanned ground vehicles.

Briefs: Electronics & Computers
Equipment designers can simplify design efforts and adjust controller platforms as needed when they standardize on electronic input/output products.

Briefs: Unmanned Systems
Onboard cameras can be used to keep damaged quadcopters in the air and flying stably, even without GPS.

Briefs: Wearables
A stretchable system can harvest energy from human breathing and motion.

Briefs: Manufacturing & Prototyping
A technique enables manufacturing of minuscule robots by interlocking multiple materials in a complex way.
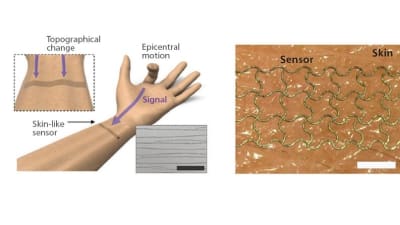
Briefs: Motion Control
This system can track the motion of the entire body with a small sensory network.
Briefs: Manufacturing & Prototyping
The integrated tool eliminates the need for manual operators or additional custom fixtures.

Briefs: Motion Control
Applications include aiding patients with impaired hand muscle strength and in manufacturing for operating tools for extended periods of time.

Briefs: Transportation
This partially superconducting machine can be used as a motor or generator.

Briefs: Motion Control
Applications include retractable covers and awnings, camera booms, and spacecraft and astronaut positioning.

Briefs: Mechanical & Fluid Systems
The magnetic, multi-material pump was 3D-printed all in one piece.


Briefs: Automotive
This detector could help robots, drones, and self-driving cars avoid collisions.

Briefs: Robotics, Automation & Control
These hands, with a large grasping force, enable safer human-robot interactions.

Briefs: Motion Control
The tiny motor can be powered by both thermal and electrical energy.

Briefs: Robotics, Automation & Control
The Tentacle Bot can grip, move, and manipulate a wide range of objects.

Briefs: Test & Measurement
This system has a capacity of more than 1,500 times the volume of a typical testing facility.

Briefs: Motion Control
A soft hydrogel, driven by an oscillatory chemical reaction, produces an autonomous integrated pump for microfluidic applications.

Briefs: Robotics, Automation & Control
This mini robot improves precision and control of teleoperated surgical procedures.

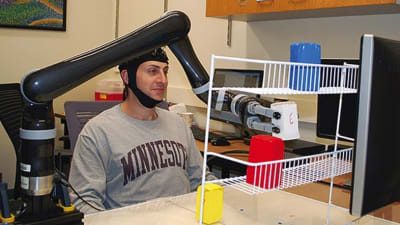
Briefs: Sensors/Data Acquisition
This technique can be used by people who are paralyzed or have neurodegenerative diseases.
Briefs: Nanotechnology
The ultra-light robotic insect can be folded or crushed, yet continues to move.

Briefs: Unmanned Systems
The robots could fly silently for covert operations and stay steady through turbulence.

Briefs: Materials
This material could be used for artificial muscles that power bio-inspired robots.

Briefs: Nanotechnology
Aerogels based on cellulose nanofibers can effectively shield electromagnetic radiation over a wide frequency range.

Briefs: Sensors/Data Acquisition
This approach could be used to cost-effectively make soft robots and wearable technologies.

Briefs: Mechanical & Fluid Systems
Applications include absorbers, tuned mass dampers, harmonic absorbers, and seismic dampers.

Top Stories
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 Blog: Energy
Blog: Energy
Batteries that Can Withstand the Cold
 INSIDER: Energy
INSIDER: Energy
Advancing All-Solid-State Batteries
 Quiz: Energy
Quiz: Energy
 Blog: Physical Sciences
Blog: Physical Sciences
 Blog: Materials
Blog: Materials
Webcasts
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Cooling a New Generation of Aerospace and Defense Embedded...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure
 Upcoming Webinars: Internet of Things
Upcoming Webinars: Internet of Things
A FREE Two-Day Event Dedicated to Connected Mobility
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Choosing the Right N-Port Strategy: Multiport VNAs vs. Switch...
























