
Stories
51
167
0
1380
30
Briefs: Robotics, Automation & Control
Tension-Stiffened and Tendon-Actuated Space Manipulators
The Space Shuttle Remote Manipulator System (SRMS) and Space Station Remote Manipulator System (SSRMS) have proven the benefit of long-reach manipulators, with the reach of both manipulators in the l5-18-m class. Manipulators with greater reach provide many benefits. The SRMS’s limited...
Briefs: Robotics, Automation & Control
NASA Tensegrity Robotics Toolkit (NTRT)
Tensegrity robots have many unique properties useful for robots intended to operate in natural settings, yet the exploration of how to build and control such robots is just beginning. Many of their positive qualities, such as multipath force distribution, compliance, and their oscillatory nature, also make...
Briefs: Robotics, Automation & Control
RoboSimian Software System from the DARPA Robotics Challenge Finals
A software architecture to allow semi-autonomous mobile manipulation of highly dexterous robots under degraded communications was developed to enable remote operation of a mobile manipulation robot as a first responder in a disaster-response scenario. The software architecture is...
Question of the Week: Robotics, Automation & Control
Is it possible to empathize with robots as we do with humans?
This week's Question: According to a recent study by researchers in Japan, our brain's empathetic reaction toward humanoid robots in perceived pain is similar to that toward humans in the same situation. The researchers hooked up 15 healthy adults to electroencephalography (EEG) monitors...
Briefs: Robotics, Automation & Control
Autonomous Micro Aerial Vehicle Flight Using Optical Flow and Inertial Cues
Micro aerial vehicles (MAVs) are agile and have unstable flight dynamics. They require a failsafe method to be navigated through areas even without GPS coverage. The approach of this work is to use only the feature matches between two consecutive images, i.e. optical flow...
Briefs: Robotics, Automation & Control
Universal Robotically Operated Leave-Behind Gripper
This universal robotically operated leavebehind gripper allows robotic (or extravehicular activity — EVA) attachment capability of any object at eight existing types of attachments at the International Space Station (ISS). It enables expansion of external stowage and payload sites to include...
Briefs: Robotics, Automation & Control
DshellCommon Simulation Framework
DshellCommon software has been developed for specifying and executing generic multibody system simulations. This innovation helps the user create and execute simulations for mechanisms, vehicles, spacecraft, or other systems by making it easier to write simulation “run scripts” for systems that vary from simple...
Briefs: Robotics, Automation & Control
Neutrally Buoyant Tank Inspection and Cleaning Robot
Huge savings in cost and inspection times (as well as improved safety) could be obtained by performing in-service inspection of tank floors and walls with robotic devices. This would have a reduced environmental impact and meet EPA and state regulations.
Briefs: Robotics, Automation & Control
Visualization and Introspection for Teleoperation of Robotic Systems
The Space Exploration and Analysis Simulations (SEAS) project at JPL performs analysis of advanced mission and system concepts on behalf of NASA. One of the concepts being explored involves operation of robotic rovers on the Moon from a remote operator station located either at a...
Briefs: Robotics, Automation & Control
The Exoskeleton (EXO) is a device that falls into a new classification of robotics called wearable robots. On-orbit applications include countermeasures and dynamometry, allowing for continual assessment of a...

Articles: Robotics, Automation & Control
Compact, Long-Reach Robotic Arm
William R. Doggett, John T. Dorsey, George G. Ganoe, Thomas C. Jones, and Cole K. Corbin, Langley Research Center (Hampton,...

INSIDER: Motion Control
Engineers Put 'Spring' in Robots' Step
The ATRIAS robot model developed at Oregon State University uses a "spring-mass" walking approach. The natural-gait method gives human-sized bipedal robots the ability to blindly react to rough terrain, maintain balance, retain an efficiency of motion, and walk like humans.
INSIDER: Mechanical & Fluid Systems
The Biomechatronics Group at MIT is using a data-driven approach to study the mechanics and control of human walking, with the goal of applying the findings to hardware control. PhD...

INSIDER: Software
Researchers Test Robot's 'Light Touch'
Using an air-fluidized bed trackway filled with poppy seeds or glass spheres, researchers at the Georgia Institute of Technology systematically varied the stiffness of the ground to mimic a variety of surfaces, from hard-packed sand to powdery snow. By studying how running lizards, geckos, crabs, and a robot...
INSIDER: Medical
Researchers have developed a three-fingered soft robotic hand with embedded, stretchable fiber optic strain sensors. By using fiber optics, the researchers were able to embed 14 strain...
INSIDER: Robotics, Automation & Control
Robots Provide 3D Map of England's Deepwater Canyons
Using a unique combination of marine robotics and ship-based measurements, the Southampton, UK-based National Oceanography Centre (NOC) produced a three-dimensional picture of submarine canyon habitats. The information captured in the new set of maps ranges in scale from the 200-km canyon down...
INSIDER: Robotics, Automation & Control
Soft machines and robots are becoming more and more functional, capable of moving, jumping, gripping an object, and even changing color. The elements responsible for their actuation...

INSIDER: Robotics, Automation & Control
Most robots on a factory floor are equipped with large pincers or claws to grab an object and place it somewhere else in an assembly line. Engineers at MIT have now hit upon a way to impart...

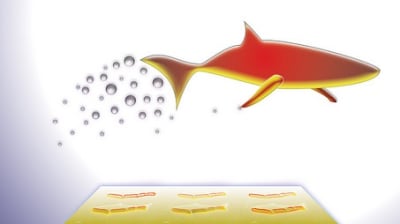
INSIDER: Manufacturing & Prototyping
Nanoengineers at the University of California, San Diego used an innovative 3D printing technology they developed to manufacture multipurpose fish-shaped microrobots that swim around...
News: Robotics, Automation & Control
Depth-sensing cameras, such as Microsoft’s Kinect controller for video games, have become widely used 3-D sensors. Now, a new imaging technology addresses a major...

News: Robotics, Automation & Control
SLAM, or simultaneous localization and mapping, enables mobile autonomous robots to map their environments and determine their locations. SLAM can be used to improve object-recognition systems, a vital component of...

R&D: Robotics, Automation & Control
Micro-Tentacles Help Robots Handle Delicate Objects
Engineers from Iowa State University developed micro-tentacles that enable robots to handle delicate objects.
“Most robots use two fingers. To pick things up, they have to squeeze,” said Jaeyoun (Jay) Kim, an Iowa State University associate professor of electrical and computer engineering and...
Briefs: Robotics, Automation & Control
Preliminary data was recently provided for a reaction sphere prototype on NASA’s zero-gravity parabolic flight vehicle. Gyroscope telemetry indicates that reaction spheres were...

Briefs: Robotics, Automation & Control
Nanosatellite Launch Adapter System
NASA has developed a Nanosatellite Launch Adapter System (NLAS) that maximizes the efficiency of satellite launch missions. NLAS increases access to space while simplifying the integration process of miniature satellites, called nanosats or CubeSats, onto launch vehicles. While a complete NLAS consists of an...
Briefs: Robotics, Automation & Control
James Webb Space Telescope Microshutters Subsystem Project Thermal Chamber Ground Support Equipment Automated Control
An automated control system for the microshutter assembly (MSA) portion of the JWST MSS (James Webb Space Telescope Micro shutters Subsystem) was developed. This is a cryogenic device that operates at 35 K. Cooling down and warming...
Briefs: Robotics, Automation & Control
Visual Environment for Remote Virtual Exploration (VERVE)
VERVE is a 3D visualization system that provides situational awareness, science analysis tools, and data understanding capabilities for robotics researchers and exploration science operations. VERVE includes telemetry views that show remote system status, and can be extended to support...
Briefs: Robotics, Automation & Control
Optimal Alarm System Design and Implementation
An optimal alarm system can robustly predict a level-crossing event that is specified over a fixed prediction horizon. The code contained in this package provides the tools necessary to design an optimal alarm system for a simple stationary linear dynamic system driven by white Gaussian noise.
Briefs: Robotics, Automation & Control
Mars Science Laboratory Flight Software for Autonomous Drilling
One of the goals of the Mars Science Laboratory (MSL) mission is to collect powderized samples from the interior of rocks and deliver them to onboard science instruments. This goal is achieved using the algorithms and software that control the drill hardware to produce a system that...
Briefs: Robotics, Automation & Control
Morpheus Lander Vehicle Simulation/Vehicle Flight Software
The Morpheus simulation is a suite of software models that simulates the performance of a lander vehicle. The specific vehicle is a terrestrial lander used as a “vertical test bed” platform for developing technology, and proving hardware and software systems for use in space...
Top Stories
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 News: Energy
News: Energy
 INSIDER: Energy
INSIDER: Energy
Advancing All-Solid-State Batteries
 Blog: Energy
Blog: Energy
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Aerial Microrobots That Can Match a Bumblebee's Speed
 Blog: Communications
Blog: Communications
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
Webcasts
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Unmanned Systems
Upcoming Webinars: Unmanned Systems
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Cooling a New Generation of Aerospace and Defense Embedded...
 Upcoming Webinars: Sensors/Data Acquisition
Upcoming Webinars: Sensors/Data Acquisition
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
























