
Stories
40,51
0
3690
30
Briefs: Software
In the area of maintaining conventional motorcycle stability, engineers have established a series of tests that measure the wobble, weave, and kickback of every new model before it is released...
Briefs: Robotics, Automation & Control
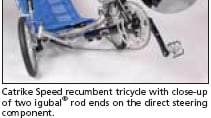
When developing the steering component of the Catrike Speed recumbent tricycle, the manufacturer switched from metal bearings to igubal® plastic rod ends for lighter weight (80% less) and...
Briefs: Robotics, Automation & Control
A multitude of tests are necessary during the manufacture of sophisticated tables used to position patients in nuclear-medicine-based medical imaging machines. Some of the tests,...

Articles: Mechanical & Fluid Systems
While technology has advanced and there are many new ways to accomplish useful motion within particular applications, electric motors and gearheads are still the preferred and most popular choices for power...

Briefs: Electronics & Computers
Additional Drive Circuitry for Piezoelectric Screw Motors
Modules of additional drive circuitry have been developed to enhance the functionality of a family of commercially available positioning motors (Picomotor™ or equivalent) that provide linear motion controllable, in principle, to within increments ≤30 nm. A motor of this type includes a...
Briefs: Information Technology
The Control Architecture for Multirobot Outpost (CAMPOUT) is a distributed-control architecture for coordinating the activities of multiple robots. In the CAMPOUT, multiple-agent activities and...
Briefs: Motion Control
Compact Motors Provide Motion Control for Explosive Ordnance Disposal Robot
A remote-controlled, compact Explosive Ordnance Disposal Robot (EOD) has been deployed in Iraq, Afghanistan, and other worldwide locations to secure and transport hazardous, dangerous, or suspicious materials to a safe location where it can be disarmed or destroyed. The...
Briefs: Robotics, Automation & Control
Improving Control of Two Motor Controllers
A computer program controls motors that drive translation stages in a metrology system that consists of a pair of two-axis cathetometers. This program is specific to Compumotor Gemini (or equivalent) motors and the Compumotor 6K-series (or equivalent) motor controller. Relative to the software supplied...
Briefs: Robotics, Automation & Control
Two-Armed, Mobile, Sensate Research Robot
The Anthropomorphic Robotic Testbed (ART) is an experimental prototype of a partly anthropomorphic, humanoid- size, mobile robot. The basic ART design concept provides for a combination of two-armed coordination, tactility, stereoscopic vision, mobility with navigation and avoidance of obstacles, and...
Briefs: Robotics, Automation & Control
The Directional Acceleration Vector-Driven Displacement of Fluids (DAVDDOF) system, under development at the time of reporting the information for this article, would be a relatively compact,...

Briefs: Robotics, Automation & Control
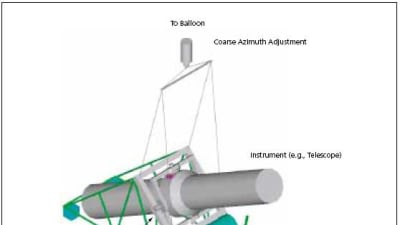
A control system has been designed to keep a balloon-borne scientific instrument pointed toward a celestial object within an angular error of the order of an arc second. The design is...
Briefs: Robotics, Automation & Control
An improved type of exhaust nozzle has been invented to help optimize the performances of multitube detonative combustion engines. The invention is applicable to both air-breathing and...

Briefs: Aerospace
Concepts are being investigated for exploratory missions to Mars based on "Bioinspired Engineering of Exploration Systems" (BEES), which is a guiding principle of this...

Briefs: Robotics, Automation & Control
An electromechanical exoskeletal arm apparatus has been designed for use in controlling a remote robotic manipulator arm. The apparatus, called a “force-feedback exoskeleton arm master” (F-EAM) is...

Briefs: Motion Control
A noncontact position sensor has been designed for use with a specific two-dimensional linear electromagnetic actuator. To minimize the bulk and weight added by the sensor, the sensor has been...

Briefs: Robotics, Automation & Control
A proposed design for an electromagnetic brake would increase the reliability while reducing the number of parts and the weight, relative to a prior commercially available electromagnetic brake. The reductions of...

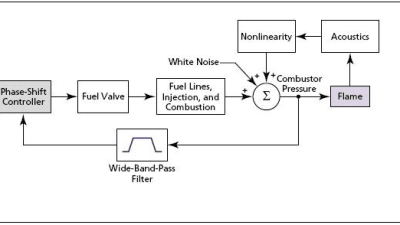
Briefs: Motion Control
A method of feedback control has been proposed as a means of suppressing thermo-acoustic instabilities in a liquid- fueled combustor of a type used in an aircraft engine. The basic...
Briefs: Robotics, Automation & Control
As noted in the previous article, the field-induced force density on a magnetic fluid is proportional to the magnetic susceptibility times the gradient of the magnetic field squared. The direction of the...
Briefs: Robotics, Automation & Control
Pumping Liquid Oxygen by Use of Pulsed Magnetic Fields
An effort is underway to develop a method of pumping small amounts of liquid oxygen by use of pulsed magnetic fields. This development is motivated by a desire to reduce corrosion and hazards of explosion and combustion by eliminating all moving pump parts in contact with the pumped oxygen.
Briefs: Robotics, Automation & Control
A Software Architecture for Semiautonomous Robot Control
A software architecture has been developed to increase the safety and effectiveness with which tasks are performed by robots that are capable of functioning autonomously but sometimes are operated under control by humans. The control system of such a robot designed according to a prior...
Briefs: Robotics, Automation & Control
A plasma accelerator has been conceived for both material-processing and spacecraft-propulsion applications. This accelerator generates and accelerates ions within a very small volume. Because of its compactness, this...
Briefs: Motion Control
A product line of improved electrohydraulic linear actuators has been developed. These actuators are designed especially for use in actuating valves in rocket-engine test facilities. They are also...

Briefs: Mechanical & Fluid Systems
Modifications have been proposed to effect further improvement of the device described in “Improved Piezo- electrically Actuated Microvalve” (NPO-30158), NASA Tech Briefs, Vol. 26,...

Briefs: Mechanical & Fluid Systems
A proposed normally-closed microvalve would contain a piezoelectric bending actuator instead of a piezoelectric linear actuator like that of the microvalve described in the preceding article....

Briefs: Mechanical & Fluid Systems
Designers of deep submersibles are reluctant to use conventional shafts and seals to penetrate the hulls of deep submersible, pressure vessels fearing seal...

Briefs: Motion Control
The figure depicts the aspects of a proposed deceleration-limiting design for crash walls at the sides of racetracks and highways. The proposal is intended to overcome the dis- advantages of...

Briefs: Mechanical & Fluid Systems
Continuous Tuning and Calibration of Vibratory Gyroscopes
A method of control and operation of an inertial reference unit (IRU) based on vibratory gyroscopes provides for continuously repeated cycles of tuning and calibration. The method is intended especially for application to an IRU containing vibratory gyroscopes that are integral parts of...
Briefs: Motion Control
The Morrison rotor, named after its inventor, is a hybrid rotor for use in a bearingless switched-reluctance electric motor. The motor is characterized as bearingless in the sense that it does not...

Briefs: Motion Control
The designers and manufacturers of fuel cells are continually striving to improve the efficiency of their products. A design challenge facing the engineer relates to...

Top Stories
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 Blog: Energy
Blog: Energy
Batteries that Can Withstand the Cold
 INSIDER: Energy
INSIDER: Energy
Advancing All-Solid-State Batteries
 Quiz: Energy
Quiz: Energy
 Blog: Physical Sciences
Blog: Physical Sciences
 Blog: Materials
Blog: Materials
Webcasts
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Cooling a New Generation of Aerospace and Defense Embedded...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure
 Upcoming Webinars: Internet of Things
Upcoming Webinars: Internet of Things
A FREE Two-Day Event Dedicated to Connected Mobility
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Choosing the Right N-Port Strategy: Multiport VNAs vs. Switch...
























