
A sampling device and a deployment method were developed that allow collection of a predefined sample volume from up to a predefined depth, precise sampling site selection, and low impact on the deploying spacecraft. This device is accelerated toward the sampled body, penetrates the surface, closes a door mechanism to retain the sample, and ejects a sampling tube with the sample inside. At the same time the drive tube is accelerated, a sacrificial reaction mass can be accelerated in the opposite direction and released in space to minimize the momentum impact on the spacecraft. The energy required to accelerate both objects is sourced locally, and can be a spring, cold gas, electric, or pyrotechnic. After the sample tube is ejected or extracted from the drive tube, it can be presented for analysis or placed in a sample return capsule.
There was developed a series of sample retention mechanisms. A bistable blade sample retention mechanism is more suitable to a circular cross-section drive tube when hermetic sample canister closing is not required. It consists of a series of thin sheet blades, located in the wall of the sample canister, which bends along the long axis and provides higher buckling and bending stiffness. A pull or push guillotine blade is more suitable for a rectangular cross-section drive tube, and provides a more definite sample canister closure and sample retention. The pull guillotine blade is stowed on the sample canister wall and has the edges guided in slots in the adjacent walls. After the full penetration depth is reached, the blade is pushed and closes the bottom of the sample canister. The pull guillotine blade includes an additional cutout section to allow the sample to enter the sample canister during the penetration. The blade strips that are left from the blade on the side of the cutout section can roll on wheels to reduce blade necessary pull force during the engagement. Electromechanical actuators, constant force springs, and torsion springs can be used for actuating the blades during engagement and sample retention.
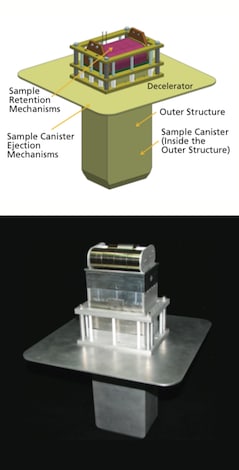
The canister ejection mechanisms eject the sample canister with the enclosed sample at the end of the sample retention mechanism engagement or when it is independently triggered. It consists of a trigger mechanism, a series of pull pins, a series of springs, and a push plate. The compressed springs push the plate against a shoulder in the sample canister and accelerate it out of the outer structure. Once the push plate has reached a desired travel, it is retained along with the springs on the decelerator and outer structure on the comet. Only the ejected sample canister is then returned to the spacecraft for further processing.
The reactionless drive tube allows for sample collection with a large strength range from the proximity of a low-gravity body with minimum disturbance to the deploying spacecraft. It includes a separate sample canister to allow for a known geometry object handling with a clean surface, a sample retention mechanism that allows stowing in a thin wall tube, and mechanisms for sample retention mechanisms actuation and sample canister ejection.
This work was done by Mircea Badescu, Nicholas Wiltsie, Robert G. Bonitz, Paul G. Backes, Anthony J. Ganino, and Nicolas E. Haddad of Caltech for NASA’s Jet Propulsion Laboratory. NPO-49371
This Brief includes a Technical Support Package (TSP).
Reactionless Drive Tube Sampling Device and Deployment Method
(reference NPO49371) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines the development of a Reactionless Drive Tube Sampling Device and Deployment Method, designed for collecting samples from low-gravity bodies, such as comets, with minimal disturbance to the spacecraft. This technology is particularly relevant to NASA's goals, as identified in the 2011 Planetary Science Decadal Survey, which prioritized Comet Surface Sample Return (CSSR) missions.
The sampling device consists of a drive tube that houses a sample canister, a decelerator, and mechanisms for sample retention and ejection. The drive tube can have either a circular or rectangular cross-section and is equipped with an energy storage device. During operation, the drive tube is accelerated toward the target body while a sacrificial mass is propelled in the opposite direction. This reactionless mechanism minimizes the momentum impact on the spacecraft, allowing for precise sampling without significant disturbance.
Upon reaching the target, the drive tube penetrates the surface, activates a sample retention mechanism, and either ejects or allows for the extraction of the sample canister, which contains the collected sample. The design includes features such as chamfered edges on the external structure to facilitate penetration and a decelerator to control the depth of penetration based on the kinetic energy of the drive tube.
The document emphasizes the novelty of this approach, highlighting its advantages over prior methods, including the ability to collect predefined sample volumes from specific depths while maintaining low impact on the spacecraft. The technology is adaptable, allowing for various energy delivery methods, such as springs, cold gas, or pyrotechnics, to accelerate the drive tube and sacrificial mass.
Overall, this innovative sampling device and deployment method represent a significant advancement in the field of planetary exploration, enabling future missions to collect and return samples from celestial bodies with greater efficiency and reduced risk to the spacecraft. The research was conducted at NASA's Jet Propulsion Laboratory and is part of ongoing efforts to enhance the capabilities of space exploration technologies.