
NASA is developing technologies to enable in situ analysis and sample acquisition from planetary bodies. Missions to these diverse locations require autonomous, highly customizable, reliable tools. A tool capable of core generation, capture, and transfer, and customizable for different missions, would be very valuable.
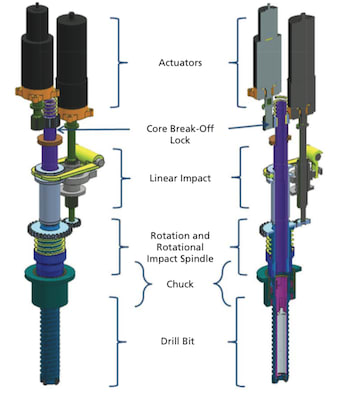
The percussion mechanism, which generates the impact energy necessary to facilitate rock fracture during drilling, can be driven by the spindle motor to reduce the number of actuators required, or by a separate actuator for greater tool flexibility during operation. The percussion mechanism includes a drive shaft, eccentric cam, a lever with a shaft, a striker, and an anvil. This design configuration allows the use of only two actuators to control all four main functions of the sampling tool. If the mission allows, the tool design is flexible enough to allow the use of up to four actuators for each individual function for greater tool operational flexibility.
The sample acquisition tool performs four main functions: generates core, breaks the core at a desired location, retains the core, and allows bit change-out for sample transfer. The drill bit includes a drill bit body, a pinch tube, and a sample tool. The drill bit body has a cylindrical form with four teeth, outside flutes for cutting removal, sliding and chuck locking features, inside and outside keys for accepting the spindle rotational DOF and pinch tube control, and pinch tube finger control surfaces.
The chuck includes a set of locking balls, a control sleeve, a pair of bushings, and may include an additional pair of bearings. The directionally dependent spindle mechanism used for either bit rotation or rotary impact torque generation includes a drive shaft with a drive pinion gear, a spindle gear, a spindle body, a preload spring, a thrust bearing, a striker, and detent balls.
The tool takes advantage of the inherent brittleness of rocks by combining dynamically generated impact loading to facilitate rock fracture with a rotation DOF for cuttings removal. The tool can be implemented on a variety of landed platforms with low force and power capabilities, and can increase in complexity to provide additional tool usage flexibility and efficiency.
This work was done by Mircea Badescu, Kerry J. Klein, Phillip E. Walkemeyer, and Nicolas E. Haddad of Caltech for NASA’s Jet Propulsion Laboratory. NPO-48709
This Brief includes a Technical Support Package (TSP).
Rotary-Hammer Core Sample Acquisition Tool
(reference NPO48709) is currently available for download from the TSP library.
Don't have an account?