
A compact two-axis scanning-mirror assembly (see figure) has been developed for use as part of a laser rangefinder on a robotic vehicle. The assembly is designed to enable scanning of the laser beam throughout the space surrounding the vehicle for three-dimensional mapping of objects in the vicinity.
Two-axis scanning-mirror assemblies of prior design exhibit two notable weaknesses, one being actuator backlash caused by gear-train slop. The present assembly contains direct-drive actuators that exhibit little or no backlash; as a result, the precision and resolution of beam positioning is limited only by the resolution of a feedback subsystem that is part of a control system operated in conjunction with the assembly. Moreover, because no gear trains are included, the number of moving parts is reduced and thus reliability is increased, relative to assemblies of prior design. The other notable weakness of prior designs is inability to pan continuously; the present assembly includes sliprings, which enable continuous panning.
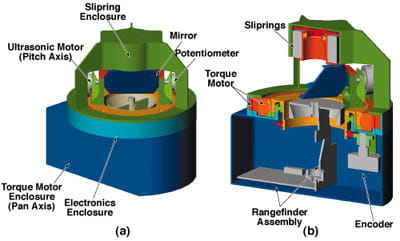
The assembly includes a base that consists of a housing for the electronic drive circuitry and for the laser system of the rangefinder. Built into the top of the housing is the stator of a pan motor. An integral part of the stator mount is a domelike structure that supports the upper end of a pan rotor subassembly. An upper support bearing and the stator of a slipring subassembly lie within the domelike structure near its top.
The pan rotor subassembly consists of the rotor of the pan motor and an arch that is part of a tilt subassembly. The arch is tipped by the rotor of the slipring subassembly. The arch spans the open bore of the rotor of the pan motor. Between the sides of the arch is the mirror, supported by a bearing on each end of a tilt axle. The mirror is driven in tilt by an ultrasonic motor (USM) on one end of the tilt axle.
The overall design was driven by the desire to build the smallest unit possible for a given mirror size [≈1.4 in. (≈3.6 cm) high by ≈2 in. (≈5.1 cm) wide] while making it possible to orient the mirror as precisely as practicable. To this end, a through-bore motor was chosen as the pan actuator. The open bore makes it possible to place part of the laser circuitry within the motor envelope, saving volume. The direct-drive, through-bore pan motor is capable of continuous pan motion and of angular positioning with relatively high resolution. Also, the direct-drive design eliminates mass and volume that would otherwise be associated with a gear train.
One important advantage of a USM is passive braking; when power is not applied, it holds its position. Hence, the use of the USM as the direct driver on the tilt axis also eliminates mass and volume that would otherwise have been associated with an external brake that would have to be put on a gear train. In addition, a USM weighs less than does a conventional electric motor.
This work was done by Brett Kennedy of Caltech for NASA's Jet Propulsion Laboratory.
NPO-20904
This Brief includes a Technical Support Package (TSP).
Two-Axis Scanning Mirror in a Small Package
(reference NPO20904) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a technical overview of a compact two-axis scanning mirror assembly developed by Brett Kennedy at NASA's Jet Propulsion Laboratory (JPL) for use in laser rangefinding applications on robotic vehicles. The primary goal of this assembly is to facilitate the scanning of laser beams for three-dimensional mapping of the surrounding environment, enhancing the vehicle's ability to navigate and interact with its surroundings.
Key features of the assembly include its small size, measuring approximately 1.4 inches high and 2 inches wide, which allows for efficient integration into robotic systems. The design employs a through-bore motor as the pan actuator, which not only saves space by housing part of the laser circuitry within the motor but also enables continuous pan motion and high-resolution angular positioning. This direct-drive mechanism eliminates the need for a gear train, reducing mass and volume while improving reliability.
A significant advantage of the assembly is its use of direct-drive actuators, which minimize actuator backlash—a common issue in prior designs that relied on gear trains. This reduction in backlash enhances the precision and resolution of beam positioning, making the system more effective for mapping tasks. Additionally, the assembly's design incorporates sliprings, allowing for continuous panning, a feature lacking in earlier models.
The assembly consists of a base housing that contains the electronic drive circuitry and laser system. The pan motor's stator is integrated into the housing, supporting a rotor subassembly that facilitates both pan and tilt movements. The mirror, which is crucial for laser beam direction, is mounted on a tilt axle driven by an ultrasonic motor (USM), further contributing to the assembly's compactness and efficiency.
Overall, this two-axis scanning mirror assembly represents a significant advancement in laser rangefinding technology, addressing the limitations of previous designs by enhancing precision, reducing moving parts, and improving reliability. The work is part of ongoing efforts by NASA and JPL to develop innovative technologies for robotic applications, showcasing the potential for improved environmental mapping and navigation in future robotic systems.