
The figure depicts a prototype of a robotic-manipulator gripping device that includes two passive compliant fingers, suitable for picking up and manipulating objects that have irregular shapes and/or that are, themselves, compliant. The main advantage offered by this device over other robotic-manipulator gripping devices is simplicity: Because of the compliance of the fingers, force-feedback control of the fingers is not necessary for gripping objects of a variety of sizes, shapes, textures, and degrees of compliance. Examples of objects that can be manipulated include small stones, articles of clothing, and parts of plants.
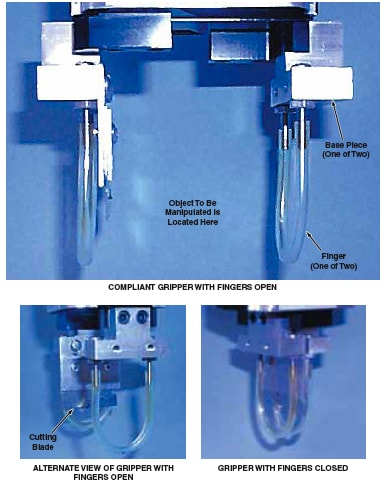
Because the specific application for which this device was designed involves picking up and cutting plant shoots for propagation of the plants, the device includes a cutting blade attached to one of the base pieces. By positioning the device to hold an object, then closing the fingers to grip the object, then driving the base pieces downward toward the object, one can cause the blade to cut the object into two pieces. Because, prior to cutting, the fingers are both holding the object and in contact with the surface on which the object is resting, it is possible to move the base pieces sideways simultaneously to center the blade while keeping the object immobile.
The prototype gripper has been shown to be capable of picking up a small object. There is a need to refine the design of the gripper; in particular, there is a need to incorporate a sensor that would measure the position of an object relative to that of the gripper. Other aspects of the design expected to be refined in continuing development include the general problem of gripping, the method of actuation for closing the fingers, the shape of the fingers, fixturing, and cutting.
This work was done by Raymond Cipra, NASA Summer Faculty Fellow from Purdue University, and Hari Das of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.techbriefs.com/tsp under the Machinery/Automation category. NPO-21104.
This Brief includes a Technical Support Package (TSP).
Compliant Gripper for a Robotic Manipulator
(reference NPO-21104) is currently available for download from the TSP library.
Don't have an account?
Overview
The document is a technical support package prepared under the sponsorship of the National Aeronautics and Space Administration (NASA) and details a compliant gripper designed for robotic manipulators. This innovation, developed by inventors Raymond J. Cipra and Hari D. Nayar at the Jet Propulsion Laboratory (JPL), aims to enhance robotic manipulation capabilities, particularly in handling irregularly shaped and variable objects.
The primary focus of the invention is a gripping device equipped with passive compliant fingers. These fingers allow the gripper to pick up and manipulate objects that may change shape when force is applied, such as plant materials or articles of clothing. This design addresses a significant challenge in robotic manipulation: the need to handle items of varying sizes, shapes, textures, and compliance without the need for complex force feedback systems. The passive nature of the gripper simplifies its operation, making it more efficient for tasks that require adaptability.
The document outlines the motivation behind the development of this technology, which is to create a robotic manipulation system capable of picking up and cutting plant shoots for propagation purposes. This application is particularly relevant in agricultural and botanical contexts, where precision and care are essential for successful plant handling.
In addition to the gripping functionality, the device also incorporates a built-in cutting mechanism, further enhancing its utility in plant propagation tasks. The combination of gripping and cutting capabilities positions this invention as a versatile tool for robotic systems in various applications.
The document emphasizes that the work was conducted at JPL under a contract with NASA, and it includes a notice regarding the non-endorsement of specific commercial products or services mentioned within. The technical report is intended to be clear and specific, as it may be made available through tech briefs for broader dissemination.
Overall, this compliant gripper represents a significant advancement in robotic technology, providing a solution to the challenges of manipulating diverse and delicate objects, thereby expanding the potential applications of robotic systems in fields such as agriculture, manufacturing, and beyond.