
Stories
40,51
0
960
30
Articles: Connectivity
IE may not be the best solution in every situation, says an industry expert.

Briefs: Materials
A new study challenges the conventional approach to designing soft robotics and metamaterials by utilizing the power of computer algorithms.

Briefs: Robotics, Automation & Control
A carbon-based biosensor could drive new innovations in brain-controlled robotics.

Briefs: Robotics, Automation & Control
These materials can detect when they are damaged, take the necessary steps to temporarily heal themselves, and then resume work.

Briefs: Manned Systems
The highly customizable robotic arm can be twisted and turned in all directions.

Application Briefs: Mechanical & Fluid Systems
Many presses continue using inefficient and unreliable hydraulic pumps.

Application Briefs: Motion Control
Students designed important components for self-balancing two-wheeled robotic vehicle.

INSIDER: Medical
The first fully autonomous biohybrid fish from human stem-cell-derived cardiac muscle cells has been developed by Harvard University researchers in collaboration with colleagues from Emory...

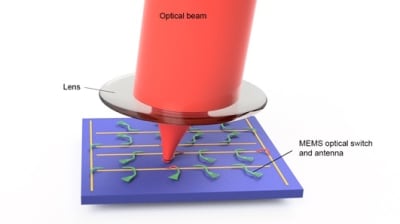
INSIDER: Transportation
High-resolution solid-state lidar using an array of MEMS switches will reduce its cost to match that of inexpensive, chip-based cameras and radar systems — removing a major barrier to...
INSIDER: Transportation
Carnegie Mellon University's Corey Harper, an assistant professor in the Department of Civil and Environmental Engineering and Heinz School of Public Policy, led a study that...

INSIDER: Physical Sciences
Crane operators at a construction site can be guided to safely and quickly transport heavy loads using an equation derived from studying the motion of a tortional pendulum.

Blog: Transportation
The wire harness is changing as vehicles become “computers on wheels.” A reader asks how electrification impacts the wiring harness.

NASA Spinoff: Automotive
NASA’s grip-strengthening glove technology aims to reduce workplace stress injuries.

Briefs: Robotics, Automation & Control
A haptic thumb-shaped sensor uses machine learning to accurately estimate where objects come into contact with the sensor and how large the applied forces are.

Podcasts: Sensors/Data Acquisition
Marcus Gerhardt and his company at Blackrock Neurotech are creating a brain-computer interface that restores senses for paralyzed patients.

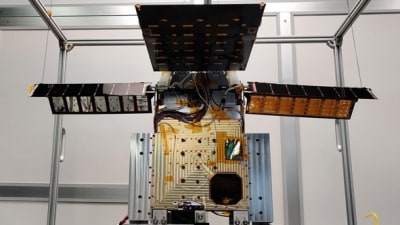
INSIDER: Unmanned Systems
When thirsty residents of a permanent community on the Moon take a swig of fresh water brought in from the lunar south pole, they’ll be enjoying the benefits of a 30-pound spacecraft known...
Special Reports: Robotics, Automation & Control
Unmanned Systems - March 2022
Powering better battlefield drones...autonomous quadcopters that fly aerobatic maneuvers...a breakthrough in compact UAV satellite communications technology. Read about these and other advances in air, ground, and...Facility Focus: Energy
Michigan engineers and collaborators are improving smart infrastructure, autonomous transportation, weather prediction, nuclear non-proliferation, and more.

Products: Energy
Smart contactors, an industrial edge platform, tiny engines, and more.

Briefs: Manufacturing & Prototyping
This testing method ensures that an exoskeleton and the person wearing it are moving smoothly and in harmony.

Articles: Test & Measurement
Automation can crumble, even when only one cog is loose, says Brad Walters from Monnit.

Application Briefs: Photonics/Optics
See how hyperspectral imaging adds value to food inspection systems.

INSIDER: Design
This new advance could pave the way for smaller, lighter, and more effective micro flying robots for environmental monitoring, search and rescue, and deployment in hazardous...

INSIDER: Sensors/Data Acquisition
Engineers at Caltech, ETH Zurich, and Harvard are developing artificial intelligence (AI) that will allow autonomous drones to use ocean currents to aid their navigation, rather than...

INSIDER: Aerospace
In the fifteenth century, artist and engineer Leonardo da Vinci envisioned a craft that flew using a single helix-shaped propeller — the aerial screw — viewed by many as...

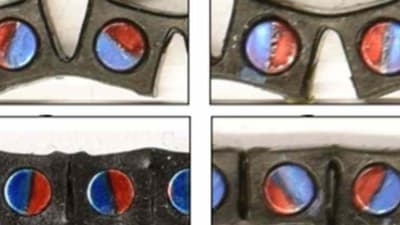
Blog: Materials
The two components offer predictable responses that support new robots and new energy-absorbing materials.
INSIDER: Sensors/Data Acquisition
Twisted nanoscale semiconductors manipulate light in a new way. This effect could be harnessed to accelerate the discovery and development of life-saving medicines as well as photonic...
Application Briefs: Motion Control
OPTIMISM, the full-scale engineering model of Perseverance, is helping NASA assess the risk of potential driving hazards on Mars.

Articles: Mechanical & Fluid Systems
The DPV concept matches the unique needs of electric vehicle cooling and energy management systems.

Top Stories
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 Blog: Energy
Blog: Energy
Batteries that Can Withstand the Cold
 INSIDER: Energy
INSIDER: Energy
Advancing All-Solid-State Batteries
 News: Energy
News: Energy
 Blog: Design
Blog: Design
 Blog: Design
Blog: Design
Webcasts
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Cooling a New Generation of Aerospace and Defense Embedded...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Battery Abuse Testing: Pushing to Failure
 Upcoming Webinars: Internet of Things
Upcoming Webinars: Internet of Things
A FREE Two-Day Event Dedicated to Connected Mobility
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Choosing the Right N-Port Strategy: Multiport VNAs vs. Switch...
























