
High-precision encoders are used by earth observation instruments and in mechanisms for laser communication terminals (LCTs). A micro-radian resolution encoder for the LCT was designed for precision pointing applications, especially in geosynchronous Earth orbit (GEO) environments with a 15-year lifetime, and in high-duty-cycle applications.
Electronic parts, mechanical design, and processes are chosen to be inherently suitable for GEO space application, while the basic principles are entirely taken over from commercial optical encoders developed and manufactured by Renishaw.
The objective of the development was to reproduce the performance of the commercial encoder, while full compatibility to specific space demands like the radiation impact of a GEO orbit and harsh thermal and vibration loads was aimed for. Both performance and spacespecific requirements were achieved to the full extent.
A collimated beam illuminates the scale. The light is emitted by an infrared LED at the wavelength of 850 nm. On the scale, marks and spaces with a period of 20 μm and a mark-to-space ratio of 50% are engraved. Light is reflected from the scale as a set of diffraction orders. These orders are then incident on a phase diffraction grating (optimized to produce no zeroth order) producing more diffraction orders. The orders from the scale and index interfere at the detector plane to produce a set of interference fringes. As the light source is partially coherent, only orders with small path length differences interfere. The result is an interference fringe that is substantially sinusoidal and free from harmonics.
The scale is usually the movable part of the encoder system. It is placed on the rotor of the drive system. Stainless steel is the material. Mark size is 10 μm wide and 5.5 mm long. The reflectivity of the marks is
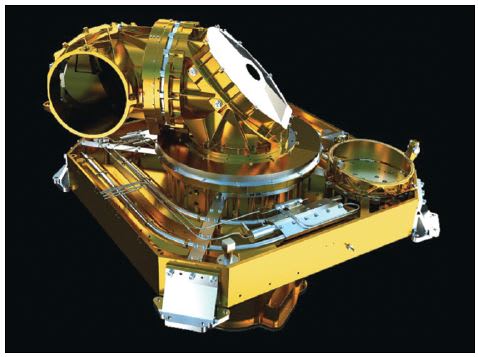
In the Laser Communication Terminal, the encoder is located in the Coarse Pointing Assembly (CPA), which is exposed to space environment (see Figure 1). To obtain maximum immunity against electro-magnetic interference, encoder data is transferred digitally from the readhead to the drive system controller located in the spacecraft. In the encoder readhead, the absolute position is calculated by combining the incremental signal and the reference marks.
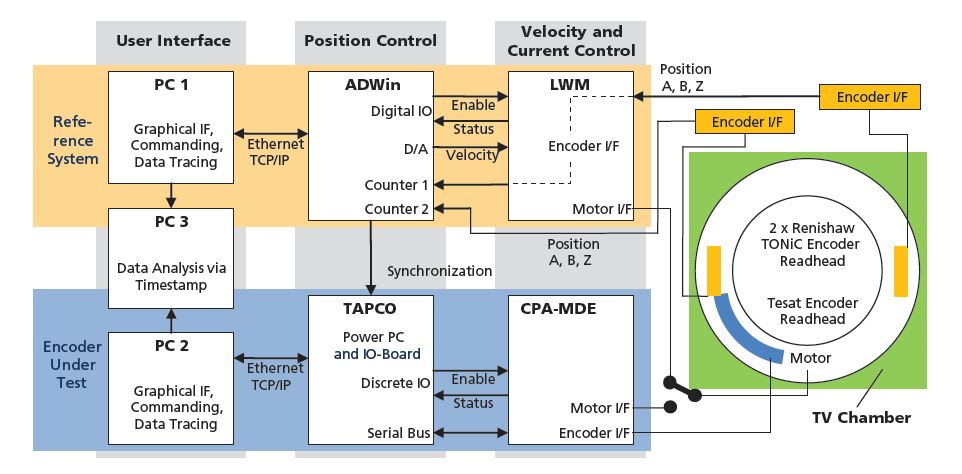
To provide the most representative functional testing, the encoder is operated in a test-as-you-fly assembly, meaning that it is mounted to a motor/bearing assembly identical to the ones that are part of the CPA in a LCT.
All functional tests were passed. The encoder continuously delivers various housekeeping data that are used to evaluate the function and performance of the control and compensation algorithms. One housekeeping parameter is the LED current. As the amplitude of the A/D converted signal is kept constant by an automatic gain control, the LED current is a measure for the success of the encoder alignment during production and installation.
This work was done by Martin Reinhardt, Konrad Panzlaff, Karl-Georg Friederich, Frank Heine, Roland Himmler, Klaus Maier, and Eberhard Möss of Tesat Spacecom; Clive Parker, Simon McAdam, Jason Slack, and Colin Howley of Renishaw; and Sabine Philipp-May and Rolf Meyer of DLR. For more information on the Renishaw products used in this project, visit http://info.hotims.com/45609-122 .