
A system has been developed to acquire and handle samples from a suspended remote platform. The system includes a penetrator, a penetrator deployment mechanism, and a sample handler. A gravity-driven harpoon sampler was used for the system, but other solutions can be used to supply the penetration energy, such as pyrotechnic, pressurized gas, or springs. The deployment mechanism includes a line that is attached to the penetrator, a spool for reeling in the line, and a line engagement control mechanism.
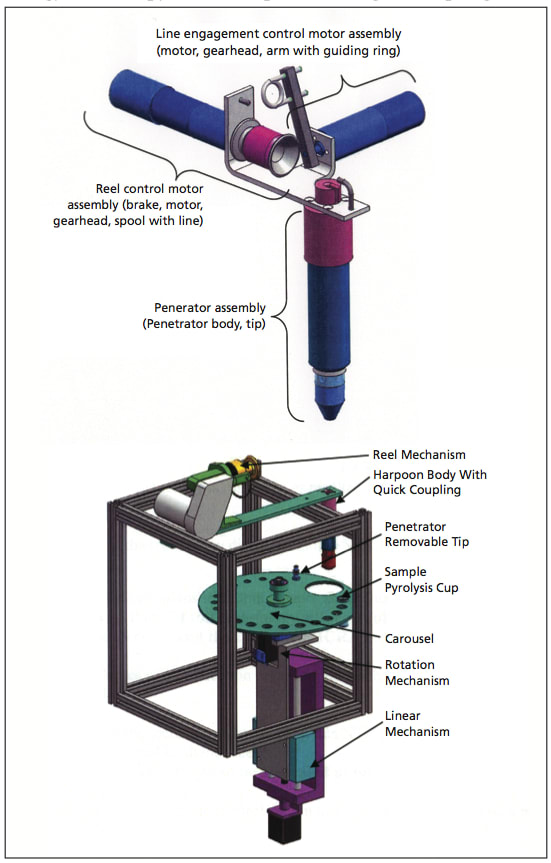
The penetrator with removable tips includes sample interrogation windows and a sample retainment spring for unconsolidated samples. The line engagement motor can be used to control the penetrator release and reeling engagement, and to evenly distribute the line on the spool by rocking between left and right ends of the spool. When the arm with the guiding ring is aligned with the spool axis, the line is free to unwind from the spool without rotating the spool. When the arm is perpendicular to the spool axis, the line can move only if the spool rotates.
This work was done by Mircea Badescu, Stewart Sherrit, and Jack A. Jones of Caltech for NASA’s Jet Propulsion Laboratory. For more information, download the Technical Support Package (free white paper) at www.techbriefs.com/tsp under the Mechanics/Machinery category. NPO-46585
This Brief includes a Technical Support Package (TSP).
Sample Acquisition and Handling System From a Remote Platform
(reference NPO-46585) is currently available for download from the TSP library.
Don't have an account?
Overview
The document outlines a novel Sample Acquisition and Handling System designed for use from remote platforms, particularly in the context of NASA's exploration missions. The system addresses the challenges associated with collecting samples from unstable surfaces, such as those encountered by aerobots (e.g., Montgolfier balloons and dirigibles) during planetary exploration.
Key features of the system include a penetrator mechanism that can be deployed multiple times to collect various types of samples, including ice, regolith, and liquids. The penetrator can be powered by different energy sources, such as gravity, pyro, pressurized gas, or springs. It is equipped with removable tips that allow for efficient sample handling and analysis. Once a sample is collected, a carousel mechanism facilitates the delivery of the sample-containing penetrator tips to a suite of analytical instruments.
The document emphasizes the reliability and scalability of the system, which can be adapted for different missions and sample collection modes. The design aims to simplify the process of sample acquisition from remote and unstable platforms, thereby enhancing the efficiency of scientific investigations on celestial bodies like Mars, Venus, Titan, Europa, and comets.
The development of this system involved extensive testing, including field tests conducted in the Mojave Desert, which demonstrated the penetrator's ability to be remotely deployed, penetrate surfaces, collect samples, and be retrieved successfully. The integration of the carousel sample handling system with the penetrator and reeling mechanism has shown promising results in laboratory settings as well.
Overall, the document highlights the innovative aspects of the sample acquisition and handling system, which is expected to play a crucial role in future NASA missions by enabling comprehensive sampling and analysis of extraterrestrial materials. The technology is positioned to address key goals of NASA's exploration initiatives, ultimately contributing to our understanding of planetary environments and the potential for life beyond Earth.