51
-1
630
30
Briefs: Mechanical & Fluid Systems
Crane Brake Release Tool
At the Rotation, Processing and Surge Facility (RPSF), the Solid Rocket Booster (SRB) segments are processed after they arrive by rail prior to a Shuttle launch. Using overhead bridge cranes capable of lifting up to 200 tons, the engineers remove the rail cover of the SRB segments, inspect the propellant grain and metal...
Briefs: Robotics, Automation & Control
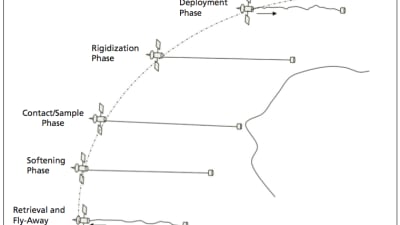
Sample acquisition from small bodies is a key capability needed for proposed comet and asteroid sample return missions. This investigation determines how to utilize shape memory materials...
Briefs: Robotics, Automation & Control
Strain System for the Motion Base Shuttle Mission Simulator
The Motion Base Shuttle Mission Simulator (MBSMS) Strain System is an innovative engineering tool used to monitor the stresses applied to the MBSMS motion platform tilt pivot frames during motion simulations in real time. The Strain System comprises hardware and software produced by...
Briefs: Mechanical & Fluid Systems
Pyrotechnic Actuator for Retracting Tubes Between MSL Subsystems
An apparatus, denoted the “retractuator” (a contraction of “retracting actuator”), was designed to help ensure clean separation between the cruise stage and the entry-vehicle subsystem of the Mars Science Laboratory (MSL) mission. The retractuator or an equivalent mechanism is...
Briefs: Mechanical & Fluid Systems
Progress has been made in the development of a family of robotic land vehicles having modular and minimalist design features chosen to impart a combination of robustness, reliability, and versatility....

Briefs: Mechanical & Fluid Systems
Compact, Lightweight Servo-Controllable Brakes
Compact, lightweight servo-controllable brakes capable of high torques are being developed for incorporation into robot joints. A brake of this type is based partly on the capstan effect of tension elements, which is described by the well known equation
Briefs: Mechanical & Fluid Systems
Robotic Arm Manipulator Using Active Control for Sample Acquisition and Transfer, and Passive Mode for Surface Compliance
A robotic arm that consists of three joints with four degrees of freedom (DOF) has been developed. It can carry an end-effector to acquire and transfer samples by using active control and comply with surface topology in a...
Briefs: Mechanical & Fluid Systems
Low-Friction, Low-Profile, High-Moment Two-Axis Joint
The two-axis joint is a mechanical device that provides two-degrees-of-freedom motion between connected components. A compact, moment-resistant, twoaxis joint is used to connect an electromechanical actuator to its driven structural members. Due to the requirements of the overall mechanism, the...
Briefs: Mechanical & Fluid Systems
Miniature Multi-Axis Mechanism for Hand Controllers
A hand controller provides up to three axes of motion, and all required feel characteristics (stiffness and breakout torques) located inside a hollow handle within the grip of the hand. This is achieved using a miniature gimbal mechanism that allows for independent motion about one, two, or three...
Briefs: Mechanical & Fluid Systems
A magnetostrictive brake has been designed as a more energy-efficient alternative to a magnetic fail-safe brake in a robot. (In the specific application, “fail-safe” signifies that the brake is normally engaged; that...

Briefs: Imaging
Robot Vision Library
The JPL Robot Vision Library (JPLV) provides real-time robot vision algorithms for developers who are not vision specialists. The package includes algorithms for stereo ranging, visual odometry and unsurveyed camera calibration, and has unique support for very wide-angle lenses (as used on the Mars Exploration Rover HazCams)....
Briefs: Robotics, Automation & Control
The design, fabrication, and microgravity flight-testing are part of a continuing development of palm-sized mobile robots that resemble spiders (except that they have six legs apiece, whereas a spider...

Briefs: Robotics, Automation & Control
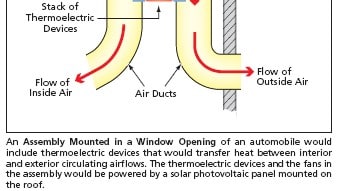
A proposed apparatus would provide or augment cooling or heating of the interior of an automobile in the presence of sunlight. The apparatus could be added to an existing automobile,...
Briefs: Motion Control
Precision X-Y stages were developed for integration into a new analytical measurement tool for use in the development of digital inks or other fluids to be jetted from ink jet...

Briefs: Software
In the area of maintaining conventional motorcycle stability, engineers have established a series of tests that measure the wobble, weave, and kickback of every new model before it is released...
Briefs: Motion Control
When developing the steering component of the Catrike Speed recumbent tricycle, the manufacturer switched from metal bearings to igubal® plastic rod ends for lighter weight (80% less) and...

Briefs: Robotics, Automation & Control
A multitude of tests are necessary during the manufacture of sophisticated tables used to position patients in nuclear-medicine-based medical imaging machines. Some of the tests,...

Briefs: Motion Control
Additional Drive Circuitry for Piezoelectric Screw Motors
Modules of additional drive circuitry have been developed to enhance the functionality of a family of commercially available positioning motors (Picomotor™ or equivalent) that provide linear motion controllable, in principle, to within increments ≤30 nm. A motor of this type includes a...
Briefs: Information Technology
The Control Architecture for Multirobot Outpost (CAMPOUT) is a distributed-control architecture for coordinating the activities of multiple robots. In the CAMPOUT, multiple-agent activities and...
Briefs: Motion Control
Compact Motors Provide Motion Control for Explosive Ordnance Disposal Robot
A remote-controlled, compact Explosive Ordnance Disposal Robot (EOD) has been deployed in Iraq, Afghanistan, and other worldwide locations to secure and transport hazardous, dangerous, or suspicious materials to a safe location where it can be disarmed or destroyed. The...
Briefs: Robotics, Automation & Control
Improving Control of Two Motor Controllers
A computer program controls motors that drive translation stages in a metrology system that consists of a pair of two-axis cathetometers. This program is specific to Compumotor Gemini (or equivalent) motors and the Compumotor 6K-series (or equivalent) motor controller. Relative to the software supplied...
Briefs: Robotics, Automation & Control
Two-Armed, Mobile, Sensate Research Robot
The Anthropomorphic Robotic Testbed (ART) is an experimental prototype of a partly anthropomorphic, humanoid- size, mobile robot. The basic ART design concept provides for a combination of two-armed coordination, tactility, stereoscopic vision, mobility with navigation and avoidance of obstacles, and...
Briefs: Robotics, Automation & Control
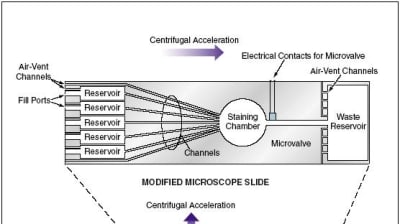
The Directional Acceleration Vector-Driven Displacement of Fluids (DAVDDOF) system, under development at the time of reporting the information for this article, would be a relatively compact,...
Briefs: Motion Control
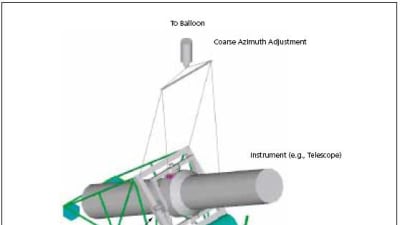
A control system has been designed to keep a balloon-borne scientific instrument pointed toward a celestial object within an angular error of the order of an arc second. The design is...
Briefs: Robotics, Automation & Control
An improved type of exhaust nozzle has been invented to help optimize the performances of multitube detonative combustion engines. The invention is applicable to both air-breathing and...

Briefs: Electronics & Computers
Concepts are being investigated for exploratory missions to Mars based on "Bioinspired Engineering of Exploration Systems" (BEES), which is a guiding principle of this...

Briefs: Robotics, Automation & Control
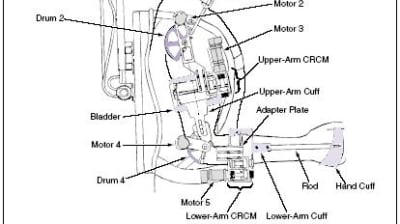
An electromechanical exoskeletal arm apparatus has been designed for use in controlling a remote robotic manipulator arm. The apparatus, called a “force-feedback exoskeleton arm master” (F-EAM) is...
Briefs: Robotics, Automation & Control
A noncontact position sensor has been designed for use with a specific two-dimensional linear electromagnetic actuator. To minimize the bulk and weight added by the sensor, the sensor has been...

Briefs: Motion Control
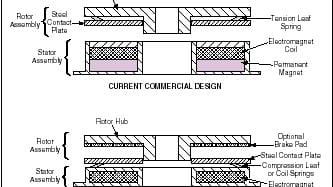
A proposed design for an electromagnetic brake would increase the reliability while reducing the number of parts and the weight, relative to a prior commercially available electromagnetic brake. The reductions of...
Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Transportation
Upcoming Webinars: Transportation
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Power
Upcoming Webinars: Power
Battery Abuse Testing: Pushing to Failure