51
-1
120
30
Briefs: Electronics & Computers
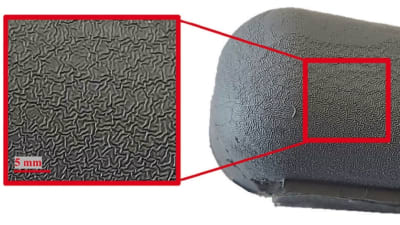
Grasping objects is a problem that is easy for a human, but challenging for a robot. Researchers designed a soft, 3D-printed robotic hand that cannot independently move its fingers but can still carry out a range of complex movements.

Briefs: Motion Control
One of the strategies to combat the mounds of waste found in oceans — especially around coral reefs — is to employ robots to master the cleanup. However, existing underwater robots are mostly bulky with rigid bodies, unable to explore and sample in complex and unstructured environments, and are noisy due to electrical motors or hydraulic pumps.

Briefs: Robotics, Automation & Control
Researchers in Carnegie Mellon University’s Robotics Institute have designed a system that makes an off-the-shelf quadruped robot nimble enough to walk a narrow balance beam — a feat that is likely the first of its kind.

Briefs: Manufacturing & Prototyping
Looking to give robots a more nimble, human-like touch, MIT engineers have now developed a gripper that grasps by reflex. Rather than start from scratch after a failed attempt, the robot adapts in the moment.

Briefs: Motion Control
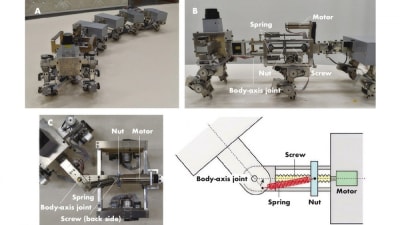
Researchers have invented a new kind of walking robot that takes advantage of dynamic instability to navigate. By changing the flexibility of the couplings, the robot can be made to turn without the need for complex computational control systems.
Briefs: Robotics, Automation & Control
Researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) have introduced a method for robust flight navigation agents to master vision-based fly-to-target tasks in intricate, unfamiliar environments.

Briefs: Robotics, Automation & Control
A brain-machine interface coupled with robot offers increased benefits for stroke survivors.

Briefs: Robotics, Automation & Control
Portable Laser-Guided Robotic Metrology
Innovators at the NASA Glenn Research Center have developed the PLGRM system, which allows an installed antenna to be characterized in an aircraft hangar. All PLGRM components can be packed onto pallets, shipped, and easily operated.
Briefs: Nanotechnology
Researchers from the University of Technology Sydney (UTS) have developed biosensor technology that will allow you to operate devices, such as robots and machines, solely through thought-control.

Briefs: Materials
Researchers have demonstrated a caterpillar-like soft robot that can move forward, backward, and even dip under narrow spaces. Its movement is driven by a novel pattern of silver nanowires.
Briefs: AR/AI
Researchers at Columbia Engineering have demonstrated a highly dexterous robot hand, one that combines an advanced sense of touch with motor learning algorithms in order to achieve a high level of dexterity.

Briefs: Imaging
Inspired by the human finger, MIT researchers have developed a robotic hand that uses high-resolution touch sensing to accurately identify an object after grasping it just one time.
Briefs: Robotics, Automation & Control
Researchers from MIT’s Improbable Artificial Intelligence Lab have developed a legged robotic system that can dribble a soccer ball under the same conditions as humans.

Briefs: Robotics, Automation & Control
Roboticists have been using a technique similar to origami to develop autonomous machines out of thin, flexible sheets. These lightweight robots are simpler and cheaper to make and more compact for easier storage and transport.

Briefs: Robotics, Automation & Control
Teaching Robots How to Predict Human Preferences in Assembly Tasks
USC Viterbi computer science researchers aim to teach robots how to predict human preferences in assembly tasks, so they can one day help out on everything from building a satellite to setting a table.
Briefs: Mechanical & Fluid Systems
A catalytic reaction causes a two-dimensional, chemically coated sheet to spontaneously morph into a three-dimensional gear.

Briefs: Robotics, Automation & Control
Ornithological animals have always benefited from folding their wings during upstroke. So, a Swedish-Swiss research team has constructed a robotic wing that can flap like a bird.

Briefs: Robotics, Automation & Control
A team of MIT engineers is designing a kit of universal robotic parts that an astronaut could easily mix and match to rapidly configure different robot “species” to fit various lunar missions.

Briefs: Robotics, Automation & Control
The new robot, developed by engineers at the University of Waterloo, uses ultraviolet (UV) light and magnetic force to move on any surface, even up walls and across ceilings.

Briefs: Mechanical & Fluid Systems
A team of researchers has designed a new system of fluid-driven actuators that enable soft robots to achieve more complex motions. The researchers accomplished this by taking advantage of the very thing — viscosity — that had previously stymied the movement of such robots.

Briefs: Robotics, Automation & Control
Researchers have developed a quadrupedal robot control technology that can walk robustly with agility even in deformable terrain such as sandy beach.

Briefs: Design
A Terminator-style shape-shifting robot able to LIQUEFY and reform has been developed by engineers inspired by sea cucumbers.

Briefs: Motion Control
A Data-Driven Framework for Testing the Safety of Legged Robots
When it comes to the evolution of mobile robots, it may be a long time before legged robots are able to safely interact in the real world, according to a new study.
Briefs: Design
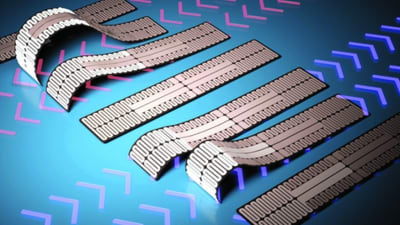
MIT engineers have come up with an innovative approach to building deformable underwater robots, using simple repeating substructures instead of unique components.

Briefs: Manufacturing & Prototyping
The piezoelectric “meta-bot” is capable of propulsion, movement, sensing, and decision-making.

Briefs: Electronics & Computers
The device uses soft robotics, ultra-thin electronics, and microfluidics.

Briefs: Robotics, Automation & Control
Researchers have developed the first ethical algorithm to fairly distribute the levels of risk rather than operating on an either/or principle.

Briefs: Software
The technology could be useful in manufacturing and assembly plants for sorting packages, or in any environment where humans and robots collaborate.
Briefs: Robotics, Automation & Control
Robotic vision has come a long way, reaching a level of sophistication with applications in complex and demanding tasks, such as autonomous driving and object manipulation.

Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: AR/AI
Upcoming Webinars: AR/AI
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Battery Abuse Testing: Pushing to Failure