
40,51
-1
660
30
Briefs: Mechanical & Fluid Systems
Variable-Aperture Reciprocating Reed Valve
NASA’s Marshall Space Flight Center engineers have developed a new reed valve for controlling fluid flow back and forth between two chambers. The VARR valve provides two-way flow that is proportional to flow demand. As the pressure gradient builds on one side, the reed valve responds by opening an amount...
Briefs: Mechanical & Fluid Systems
Passive, Integrated, Sublimator-Driven Coldplate
Spacecraft thermal control systems typically perform three key functions — heat acquisition, heat transport, and heat rejection — in addition to those of insulation, heat generation, and heat storage. In a typical pumped fluid-loop spacecraft thermal control system, heat is acquired from...
Briefs: Mechanical & Fluid Systems
Experiments in space can be expensive and infrequent, but Earth’s upper atmosphere is accessible via large scientific balloons, and can be used to address many of the same fundamental questions. Scientific balloons are made of a thin...

Briefs: Robotics, Automation & Control
Human operation in space over long time periods causes bone and muscle deterioration, so there is a need for countermeasures in the form of physical exercises consisting of working against controlled...
Briefs: Mechanical & Fluid Systems
NASA’s Kennedy Space Center has developed a novel ruggedized housing for an electrical or fluid umbilical connector that prevents intrusion of dust, sand, dirt, mud, and moisture during field use under harsh...

Briefs: Robotics, Automation & Control
Systems, Methods, and Apparatus of a Low-Conductance Silicon Micro-Leak for Mass Spectrometer Inlet
Mass spectrometers on atmospheric entry probes require a method for introducing gas from high-pressure ambient regions to the vacuum of the mass spectrometer interior.
Briefs: Mechanical & Fluid Systems
NASA’s Langley Research Center has developed three techniques and systems to calibrate and validate...

Briefs: Robotics, Automation & Control
Release of a Stuck Solar Array or Antenna
Satellite launches experience approximately one deployment failure every two years. These failures include a solar array or antenna that fails to deploy because it is stuck due to a mechanism failure, or is snagged by a cable or thermal blanket. Knowledge of the exact circumstances of the deployable failure...
Briefs: Robotics, Automation & Control
High-Heat-Flux-Capable Boundary Layer Vortex Generator and Boundary Layer Transition Device
Afixed geometry device has been developed to promote boundary layer transition and generation of streamwise vorticity, and is capable of withstanding entry heating environments for the Space Shuttle Orbiter. Designed to have a total height above the surface...
Briefs: Robotics, Automation & Control
Because of the cost-effectiveness of flying smallsats compared to large flagship spacecraft, there is increasing interest in boosting their capabilities for...

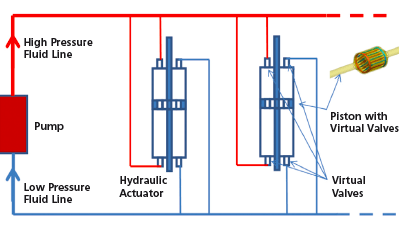
Briefs: Mechanical & Fluid Systems
This actuator was developed out of a need for a cryogenic actuator that can operate effectively in spite of the thermal mismatch involved with construction materials that have different expansion...
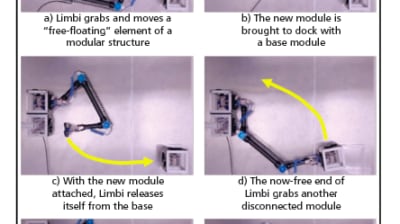
Briefs: Robotics, Automation & Control
Many future space vehicles, planetary bases, and mining operations will be too large and heavy to launch on a single rocket. Instead, component parts would need to be launched on multiple...
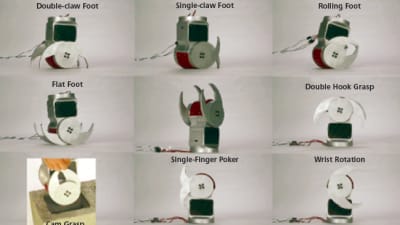
Briefs: Robotics, Automation & Control
A durable gripper tool was designed for use by RoboSimian robots intended for use in disaster scenarios that demand high-force, robust manipulation. The resulting Cam Hand fills a previously unaddressed niche that emphasizes grip...
Briefs: Robotics, Automation & Control
Autonomous Flight Termination System Reference Design Hardware
The current range ground-based infrastructure is extremely costly to operate and maintain. NASA has developed an Autonomous Flight Termination System (AFTS) that is an independent, self-contained subsystem mounted onboard a launch vehicle. The AFTS reference system eliminates the need...
Briefs: Robotics, Automation & Control
RoboSimian: Software Algorithms for a Mobile Manipulation Quadruped Robot
RoboSimian, a statically stable quadrupedal robot capable of both dexterous manipulation and versatile mobility in difficult terrain, was built to compete in the Defense Advanced Research Projects Agency (DARPA) Robotics Challenge, a competitive effort to develop hardware and...
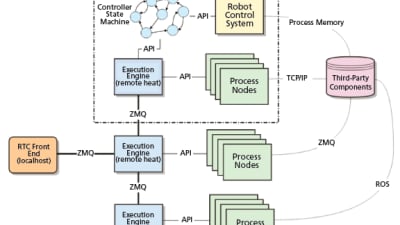
Briefs: Robotics, Automation & Control
As robotic systems are expected to perform complex tasks, system developers require tools for application programming that are more advanced than the current state of the art. Robot...
Briefs: Robotics, Automation & Control
Multi-Spacecraft Autonomous Positioning System/Network-Based Navigation
Current deep spacecraft rely heavily on ground-based navigation and tracking for state measurement. The requirement for long ground navigation passes, coupled with analysis support, produces a large latency for updating a vehicle’s state. As the current infrastructure...
Briefs: Robotics, Automation & Control
Heading Versus Tilt Chart for Assessing HGA Occlusion and Flop Risk in MSL Operations
The Mars Science Laboratory (MSL) high-gain antenna (HGA) sits low on the deck, leaving the sky occluded in many directions by other parts of the rover. Each drive must end with the rover at a heading where the Earth will be unoccluded during the next HGA...
Briefs: Robotics, Automation & Control
Rapid Forest Triage by Sub-Canopy Micro Air Vehicles
Today, tree distribution maps can only be generated manually in a very time-consuming process, and real-time microclimate mapping of a large 3D volume under tree canopy is not possible. A prototype small quadrotor unmanned aerial vehicle (UAV) system was developed that is able to maneuver in...
Briefs: Robotics, Automation & Control
Insertable, Miniature, In-Vivo Surgical Robot with Embedded Control
This innovation is a miniature, in-vivo surgical robot that is able to be inserted into the peritoneal cavity under insufflation. It is designed to perform Laparoendoscopic Single-Site Surgery (LESS). This robotic device is capable of direct visualization of the surgical procedure,...
Briefs: Robotics, Automation & Control
Contact State Estimation for Multi-Finger Robot Hands Using Particle Filters
A method, using a particle filter, has been created for identifying the location, orientation, and shape of an object that a robot hand touches. An appropriate motion model has been defined that characterizes the motion of the robot hand as it moves relative to an object....
Briefs: Robotics, Automation & Control
Tendon-Driven Finger, Wrist, and Thumb Actuation System
The Robonaut 2 (R2) Dexterous Robot is the result of an effort to build a two-armed, ten-fingered humanoid robot torso capable of assembly work. This invention concerns a multi-fingered hand, and is composed of several parts. One is a tendon-driven, four-link, four-degree-of-freedom robotic...
Briefs: Robotics, Automation & Control
Visual-Aided Inertial Navigation for Computationally Constrained Aerial Vehicles
Micro aerial vehicles (MAVs) are lightweight, highly dynamic vehicles with limited payload, sensing, and computation capabilities. There is significant interest to automate MAVs for military surveillance, reconnaissance, and search-and-rescue missions. The current...
Briefs: Robotics, Automation & Control
Robotic Surgical Devices, Systems, and Related Methods
Various advancements have been made in the development of miniature in vivo surgical robots. These robots are designed to perform Laparoendo scopic Single-Site Surgery (LESS). After being inserted through a single incision, these robots can perform surgical procedures in a dexterous workspace....
Briefs: Robotics, Automation & Control
Ship Classification Using Gnostic Fields
There are many applications for Autonomous Seaborne Vessels (ASVs). The seaborne cargo shipping industry moves over 9 billion tons of cargo per year, is worth $375 billion, and is responsible for 90 percent of world trade. Autonomous cargo ships could reduce the operating expenses of cargo ships by 44%. ASVs...
Briefs: Robotics, Automation & Control
Tension-Stiffened and Tendon-Actuated Space Manipulators
The Space Shuttle Remote Manipulator System (SRMS) and Space Station Remote Manipulator System (SSRMS) have proven the benefit of long-reach manipulators, with the reach of both manipulators in the l5-18-m class. Manipulators with greater reach provide many benefits. The SRMS’s limited...
Briefs: Robotics, Automation & Control
NASA Tensegrity Robotics Toolkit (NTRT)
Tensegrity robots have many unique properties useful for robots intended to operate in natural settings, yet the exploration of how to build and control such robots is just beginning. Many of their positive qualities, such as multipath force distribution, compliance, and their oscillatory nature, also make...
Briefs: Robotics, Automation & Control
RoboSimian Software System from the DARPA Robotics Challenge Finals
A software architecture to allow semi-autonomous mobile manipulation of highly dexterous robots under degraded communications was developed to enable remote operation of a mobile manipulation robot as a first responder in a disaster-response scenario. The software architecture is...
Briefs: Robotics, Automation & Control
Autonomous Micro Aerial Vehicle Flight Using Optical Flow and Inertial Cues
Micro aerial vehicles (MAVs) are agile and have unstable flight dynamics. They require a failsafe method to be navigated through areas even without GPS coverage. The approach of this work is to use only the feature matches between two consecutive images, i.e. optical flow...
Top Stories
 Blog: Lighting
Blog: Lighting
A Stretchable OLED that Can Maintain Most of Its Luminescence
 Blog: Energy
Blog: Energy
Batteries that Can Withstand the Cold
 INSIDER: Energy
INSIDER: Energy
Advancing All-Solid-State Batteries
 Quiz: Energy
Quiz: Energy
 Blog: Physical Sciences
Blog: Physical Sciences
 Blog: Materials
Blog: Materials
Webcasts
 Upcoming Webinars: Sensors/Data Acquisition
Upcoming Webinars: Sensors/Data Acquisition
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Cooling a New Generation of Aerospace and Defense Embedded...
 Upcoming Webinars: Sensors/Data Acquisition
Upcoming Webinars: Sensors/Data Acquisition
Beyond AI-Copy-Paste Engineering: Advanced AI-Integration Success...
 Upcoming Webinars: Power
Upcoming Webinars: Power
Battery Abuse Testing: Pushing to Failure
 Upcoming Webinars: Connectivity
Upcoming Webinars: Connectivity
A FREE Two-Day Event Dedicated to Connected Mobility
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
Choosing the Right N-Port Strategy: Multiport VNAs vs. Switch...
























