
51
-1
150
30
Briefs: Manned Systems
This novel flightpath control system exploits the dihedral effect to control the bank angle of the vehicle by modulating sideslip.

Briefs: Aerospace
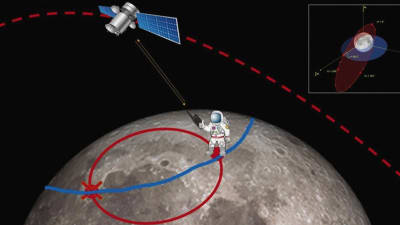
Scientists have developed a novel concept for a lunar navigation system based on the reverse-ephemeris technique.
Briefs: Materials
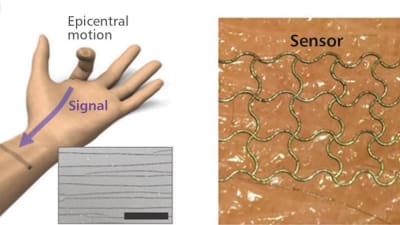
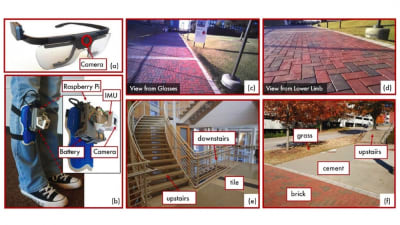
This system can track the motion of the entire body with a small sensory network.
Briefs: Motion Control
Accomplishing motion control with digitally commanded electric motors is a responsive, precise, and energy-efficient approach suitable for a wide range of applications.

Briefs: Automotive
Research reveals that expertly timed lasers shined at an approaching LIDAR system can create a blind spot in front of the vehicle.

Briefs: Design
Real-time health monitoring and sensing abilities of robots require soft electronics but a challenge of using such materials lies in their reliability.

Briefs: Sensors/Data Acquisition
The sensor can be stretched up to 50 percent with almost the same sensing performance.
Briefs: Robotics, Automation & Control
In-space and planetary surface assembly for human exploration is a challenging domain that encompasses various technological thrusts to support human missions.

Briefs: Robotics, Automation & Control
The robots will be challenged to carry out work too dangerous for humans.

Briefs: AR/AI
Researchers have been able to successfully teach micro-robots how to swim via deep reinforcement learning, marking a substantial leap in the progression of micro-swimming capability.

Briefs: Mechanical & Fluid Systems
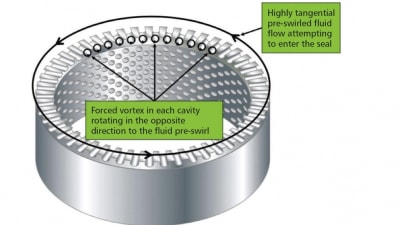
This mechanism improves rotordynamic stability in turbomachinery.
Briefs: Motion Control
The model allows robots to ask clarifying questions to soldiers.

Briefs: Motion Control
The software can be integrated with existing hardware to aid people using robotic prosthetics or exoskeletons.
Briefs: Design
Researchers designed a new type of soft robotic gripper that uses a collection of thin tentacles to entangle and ensnare objects.

Briefs: Semiconductors & ICs
A team has installed electronic “brains” on solar-powered robots that are 100 to 250 micrometers in size so that they can walk autonomously.

Briefs: Data Acquisition
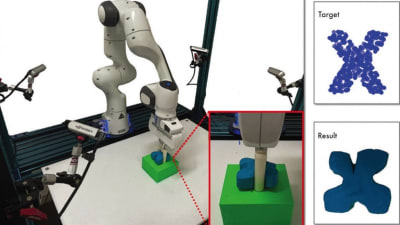
The new system learns directly from visual inputs to let a robot with a two-fingered gripper see, simulate, and shape doughy objects.
Briefs: Unmanned Systems
A team of researchers at Carnegie Mellon University believe they have developed the first AI pilot that enables autonomous aircraft to navigate a crowded airspace.

Briefs: Design
Innovators at NASA Johnson Space Center have designed an Active Debris Removal Vehicle that can remove large orbital debris from low-Earth orbit.
Briefs: Medical
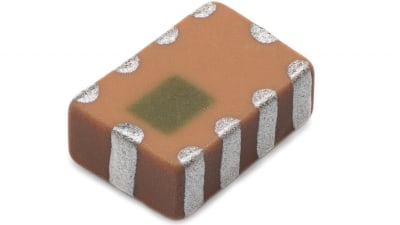
The design goal is to provide exceptional RF signal range and stability, while also reducing power consumption, in a miniaturized package.
Briefs: Manufacturing & Prototyping
NASA is developing the next generation of spacesuits for future missions.

Briefs: Imaging
Researchers at University of Central Florida have developed an artificial intelligence device that mimics the retina of the eye.
Briefs: IoMT
A new robotic system fuses visual information and radio-frequency signals to efficiently find hidden items buried under a pile of objects.

Briefs: Design
Instead of adding soft materials to a rigid robot body, researchers have taken a soft body and added rigid features to key components.
Briefs: Research Lab
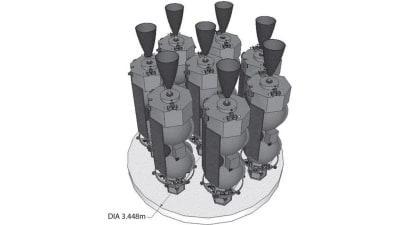
Researchers have developed a shape-shifting material that can take and hold any possible shape.

Briefs: Design
Equipment and test system designers need Ethernet devices that outperform consumer-grade components, while remaining easy to use.

Briefs: Manufacturing & Prototyping
The researchers created these sensing structures using just one material and a single run on a 3D printer.

Briefs: Robotics, Automation & Control
Made from 3D graphene foam, the sensors use a piezoresistive approach, meaning when the material is put under pressure it dynamically changes its electric resistance, easily detecting and adapting to the range of pressure required, from light to heavy.

Briefs: Test & Measurement
An open-access study in Advanced Science outlines the process by which Preston and lead author Faye Yap harnessed a spider’s physiology in a first step toward a novel area of research they call “necrobotics.”

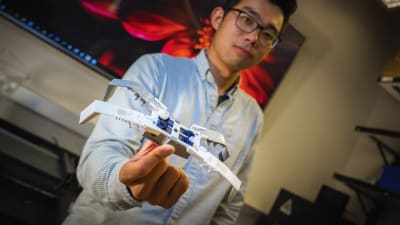
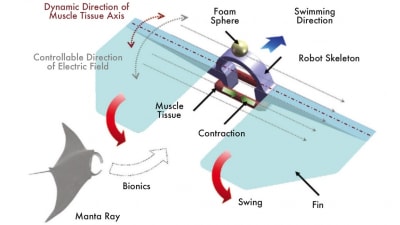
Briefs: Robotics, Automation & Control
Biomimetics is one of the most important robotic research methods which can improve the kinematic performance of robots by imitating the structure and behavior of natural organisms.
Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Transportation
Upcoming Webinars: Transportation
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Power
Upcoming Webinars: Power
Battery Abuse Testing: Pushing to Failure
























