
51
-1
210
30
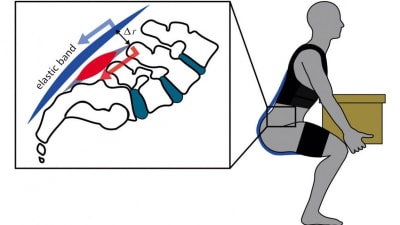
Briefs: Motion Control
The software can be integrated with existing hardware to aid people using robotic prosthetics or exoskeletons.

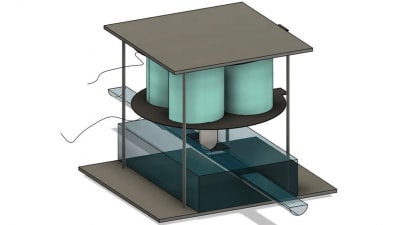
Briefs: Motion Control
Synthesized micro-robots can convert their mechanical motion into a means of self-propulsion in water.
Briefs: Motion Control
A remotely controlled microswimmer could navigate the human body and aid in drug delivery.
Briefs: Motion Control
A new fabrication technique helps improve the performance of flying micro-robots.
Briefs: Manufacturing & Prototyping
A new robot developed by Caltech researchers LEO carves out a new type of locomotion somewhere between walking and flying.

Briefs: Robotics, Automation & Control
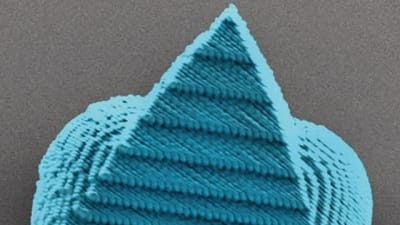
These shape memory robotic arms eliminate the need for joints, rigid skeletons, or framework.

Briefs: Robotics, Automation & Control
The robots move more quickly on solid surfaces or in the water than previous generations of soft robots.
Briefs: Communications
The suit can be controlled with a double tap to the chest or via an app.
Briefs: Robotics, Automation & Control
Neuroprosthetic technology combines robotic control with the user’s voluntary control.

Briefs: Robotics, Automation & Control
Biological insights of fruit fly eye movements could enhance robotics.

Briefs: Mechanical & Fluid Systems
The system creates accurate defect standards for in-situ inspection systems.

Briefs: Manufacturing & Prototyping
Biobots based on muscle cells can swim at unprecedented velocities.
Briefs: Robotics, Automation & Control
An electrically driven soft valve paves the way for fully soft robots.
Briefs: Robotics, Automation & Control
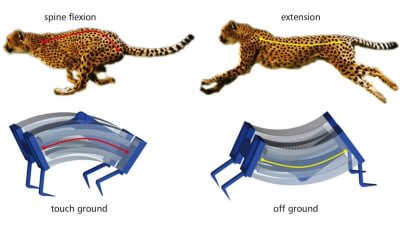
This robot can run, jump, carry heavy payloads, and turn on a dime.

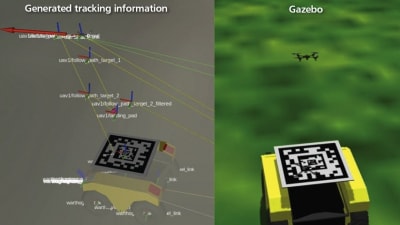
Briefs: Sensors/Data Acquisition
UAVs can land on moving unmanned ground vehicles without GPS.
Briefs: Photonics/Optics
A silicon chip provides a low-cost solution to help machines see the world clearly.

Briefs: Unmanned Systems
The algorithm calculates time-optimal trajectories that fully consider the drones’ limitations.

Briefs: Transportation
This practical technique uses magnetism to transmit electricity wirelessly to recharge electric cars, robots, or drones.

Briefs: Photonics/Optics
The “nanoswimmers” could be used to remediate contaminated soil, improve water filtration, or even deliver drugs to targeted areas of the body.
Briefs: Manufacturing & Prototyping
The multi-legged robots are capable of maneuvering in challenging environments.

Briefs: Sensors/Data Acquisition
The model allows robots to ask clarifying questions to soldiers.

Briefs: AR/AI
It can also find the nearest electric wall outlet to recharge without human assistance.

Briefs: Robotics, Automation & Control
An off-the-shelf USB camera captures the shadows made by hand gestures on the robot’s skin.

Briefs: Electronics & Computers
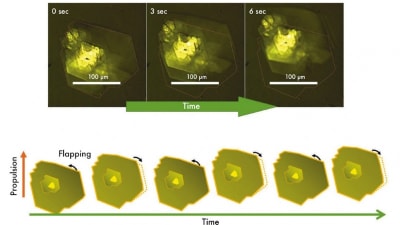
Incorporating semiconductor components, microscopic robots are made to walk with standard electronic signals.

Briefs: AR/AI
This robotic arm fuses data from a camera and antenna to locate and retrieve items buried under piles and completely out of view.

Briefs: Transportation
The system could one day replace LiDAR and cameras in automated manufacturing, biomedical imaging, and autonomous driving.

Briefs: Motion Control
In a collapsed building or on rough terrain, a robot could balance itself and move forward with just its feet.

Briefs: Motion Control
Artificial intelligence helps train robots to work together to move an object around two obstacles and through a narrow door in computer simulations.
Briefs: Energy
This work could help severely injured people, such as soldiers, regain the ability to control their movements.
Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
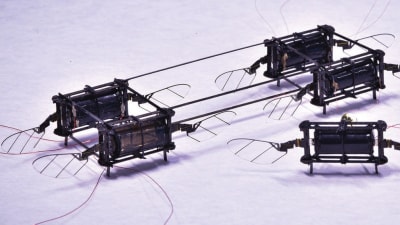
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Unmanned Systems
Upcoming Webinars: Unmanned Systems
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: AR/AI
Upcoming Webinars: AR/AI
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure
























