51
-1
180
30
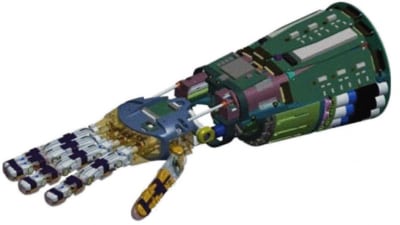
Briefs: Robotics, Automation & Control
The R2 hand and forearm assembly is designed in a modular fashion, enabling rapid replacement of components and sub-assemblies.
Briefs: Unmanned Systems
For drones to autonomously perform necessary but quotidian tasks, they must be able to adapt to wind conditions in real time.

Briefs: Lighting
The ability to emit light also brings these microscale robots, which weigh barely more than a paper clip, one step closer to flying on their own outside the lab.

Briefs: Robotics, Automation & Control
The technology could be useful in manufacturing and assembly plants for sorting packages, or in any environment where humans and robots collaborate.
Briefs: Motion Control
Interactive program aids motion planning for environments with obstacles.

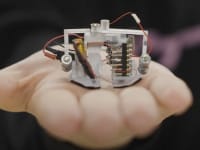
Briefs: Manufacturing & Prototyping
The piezoelectric “meta-bot” is capable of propulsion, movement, sensing, and decision-making.

Briefs: Imaging
Researchers built electroluminescent soft artificial muscles for flying, insect-scale robots.

Briefs: Robotics, Automation & Control
A new general-purpose optimizer can speed up the design of walking robots, self-driving vehicles, and other autonomous systems.

Briefs: Robotics, Automation & Control
The robots will be challenged to carry out work too dangerous for humans.

Briefs: Design
A self-aligning, self-healing system for pneumatics and cryogenics with applications in aerospace.

Briefs: Robotics, Automation & Control
In-space and planetary surface assembly for human exploration is a challenging domain that encompasses various technological thrusts to support human missions. NASA is developing autonomous assembly agents to...

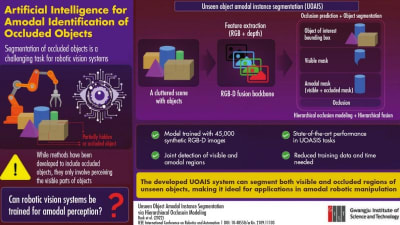
Briefs: AR/AI
Robotic vision has come a long way, reaching a level of sophistication with applications in complex and demanding tasks, such as autonomous driving and object...
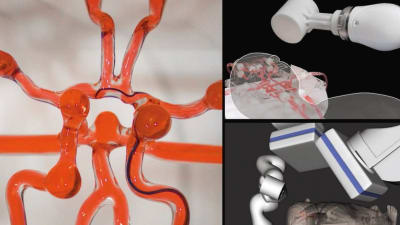
Briefs: Robotics, Automation & Control
MIT engineers have developed a telerobotic system to help surgeons quickly and remotely treat patients experiencing a stroke or aneurysm. With a modified joystick, surgeons in...
Briefs: Robotics, Automation & Control
Legged robots are very promising for use in real-world applications, but their operation in narrow spaces is still challenging. One solution for enhancing their environmental adaptability...

Briefs: Motion Control
Georgia Tech researchers have shown that robots about the size of a particle of dust are capable of precise bidirectional control. By harnessing the power of a magnetic field generated by a...

Briefs: Manufacturing & Prototyping
The automation of additive manufacturing (AM) is limited and usually still requires human labor workflows, including the fundamental step of removing the finished object from the printer...

Briefs: Imaging
Researchers have developed a robot that uses radio waves, which can pass through walls, to sense occluded objects. The robot, called RF-Grasp, combines this powerful sensing with more traditional computer vision to...

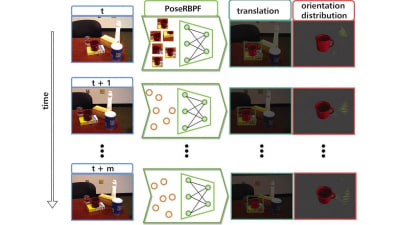
Briefs: Sensors/Data Acquisition
Robots are good at making identical repetitive movements such as a simple task on an assembly line. But they lack the ability to perceive objects as they move through an environment. A recent...
Briefs: Robotics, Automation & Control
A fish-inspired robot that can travel 26 meters through the air after takeoff could be used to collect water samples in hazardous and cluttered environments, such...

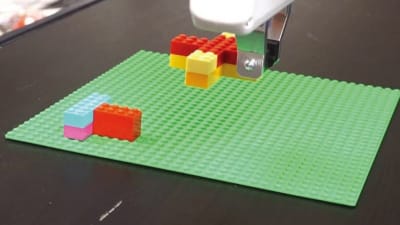
Briefs: Robotics, Automation & Control
With a training technique commonly used to teach dogs to sit and stay, computer scientists showed a robot how to teach itself several new tricks including stacking blocks. With the method,...

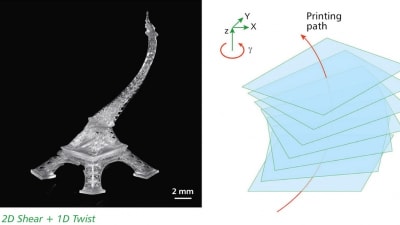
Briefs: Robotics, Automation & Control
Most conventional 3D printing processes rely on replicating a digital design model that is sliced into layers with the layers printed and assembled upward like a cake. A new method...
Briefs: Medical
Elastic polymers, known as elastomers, can be stretched and released repeatedly and are used in applications such as gloves and heart valves, where they need to last a long time without tearing. But...

Briefs: Imaging
A Penn State-led team of interdisciplinary researchers developed a polymer with robust piezoelectric effectiveness, resulting in 60 percent more efficient electricity...

Briefs: Robotics, Automation & Control
The highly customizable robotic arm can be twisted and turned in all directions.

Briefs: Robotics, Automation & Control
These materials can detect when they are damaged, take the necessary steps to temporarily heal themselves, and then resume work.

Briefs: Motion Control
A carbon-based biosensor could drive new innovations in brain-controlled robotics.

Briefs: Motion Control
A new study challenges the conventional approach to designing soft robotics and metamaterials by utilizing the power of computer algorithms.
Briefs: Robotics, Automation & Control
By electrically stimulating nerves, this therapy can reduce epileptic seizures and soothe chronic pain without the use of conventional drugs like opioids.

Briefs: Sensors/Data Acquisition
A haptic thumb-shaped sensor uses machine learning to accurately estimate where objects come into contact with the sensor and how large the applied forces are.

Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Unmanned Systems
Upcoming Webinars: Unmanned Systems
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: AR/AI
Upcoming Webinars: AR/AI
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure