51
-1
540
30
Briefs: Robotics, Automation & Control
High-Heat-Flux-Capable Boundary Layer Vortex Generator and Boundary Layer Transition Device
Afixed geometry device has been developed to promote boundary layer transition and generation of streamwise vorticity, and is capable of withstanding entry heating environments for the Space Shuttle Orbiter. Designed to have a total height above the surface...
Briefs: Robotics, Automation & Control
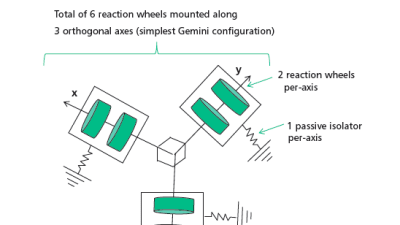
Because of the cost-effectiveness of flying smallsats compared to large flagship spacecraft, there is increasing interest in boosting their capabilities for...
Briefs: Robotics, Automation & Control
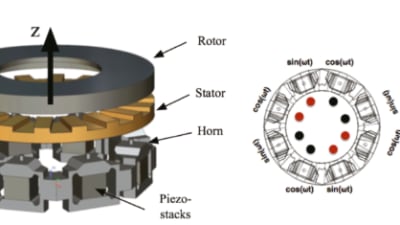
This actuator was developed out of a need for a cryogenic actuator that can operate effectively in spite of the thermal mismatch involved with construction materials that have different expansion...
Briefs: Robotics, Automation & Control
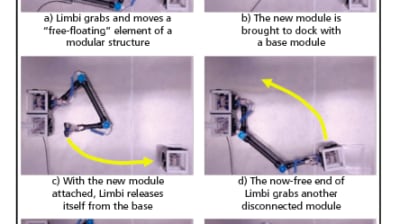
Many future space vehicles, planetary bases, and mining operations will be too large and heavy to launch on a single rocket. Instead, component parts would need to be launched on multiple...
Briefs: Robotics, Automation & Control
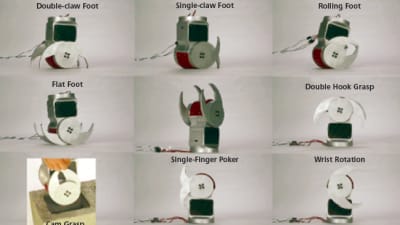
A durable gripper tool was designed for use by RoboSimian robots intended for use in disaster scenarios that demand high-force, robust manipulation. The resulting Cam Hand fills a previously unaddressed niche that emphasizes grip...
Briefs: Robotics, Automation & Control
Autonomous Flight Termination System Reference Design Hardware
The current range ground-based infrastructure is extremely costly to operate and maintain. NASA has developed an Autonomous Flight Termination System (AFTS) that is an independent, self-contained subsystem mounted onboard a launch vehicle. The AFTS reference system eliminates the need...
Briefs: Robotics, Automation & Control
RoboSimian: Software Algorithms for a Mobile Manipulation Quadruped Robot
RoboSimian, a statically stable quadrupedal robot capable of both dexterous manipulation and versatile mobility in difficult terrain, was built to compete in the Defense Advanced Research Projects Agency (DARPA) Robotics Challenge, a competitive effort to develop hardware and...
Briefs: Robotics, Automation & Control
As robotic systems are expected to perform complex tasks, system developers require tools for application programming that are more advanced than the current state of the art. Robot...
Briefs: Robotics, Automation & Control
Multi-Spacecraft Autonomous Positioning System/Network-Based Navigation
Current deep spacecraft rely heavily on ground-based navigation and tracking for state measurement. The requirement for long ground navigation passes, coupled with analysis support, produces a large latency for updating a vehicle’s state. As the current infrastructure...
Briefs: Robotics, Automation & Control
Heading Versus Tilt Chart for Assessing HGA Occlusion and Flop Risk in MSL Operations
The Mars Science Laboratory (MSL) high-gain antenna (HGA) sits low on the deck, leaving the sky occluded in many directions by other parts of the rover. Each drive must end with the rover at a heading where the Earth will be unoccluded during the next HGA...
Briefs: Robotics, Automation & Control
Rapid Forest Triage by Sub-Canopy Micro Air Vehicles
Today, tree distribution maps can only be generated manually in a very time-consuming process, and real-time microclimate mapping of a large 3D volume under tree canopy is not possible. A prototype small quadrotor unmanned aerial vehicle (UAV) system was developed that is able to maneuver in...
Briefs: Robotics, Automation & Control
Insertable, Miniature, In-Vivo Surgical Robot with Embedded Control
This innovation is a miniature, in-vivo surgical robot that is able to be inserted into the peritoneal cavity under insufflation. It is designed to perform Laparoendoscopic Single-Site Surgery (LESS). This robotic device is capable of direct visualization of the surgical procedure,...
Briefs: Robotics, Automation & Control
Contact State Estimation for Multi-Finger Robot Hands Using Particle Filters
A method, using a particle filter, has been created for identifying the location, orientation, and shape of an object that a robot hand touches. An appropriate motion model has been defined that characterizes the motion of the robot hand as it moves relative to an object....
Briefs: Robotics, Automation & Control
Tendon-Driven Finger, Wrist, and Thumb Actuation System
The Robonaut 2 (R2) Dexterous Robot is the result of an effort to build a two-armed, ten-fingered humanoid robot torso capable of assembly work. This invention concerns a multi-fingered hand, and is composed of several parts. One is a tendon-driven, four-link, four-degree-of-freedom robotic...
Briefs: Robotics, Automation & Control
Visual-Aided Inertial Navigation for Computationally Constrained Aerial Vehicles
Micro aerial vehicles (MAVs) are lightweight, highly dynamic vehicles with limited payload, sensing, and computation capabilities. There is significant interest to automate MAVs for military surveillance, reconnaissance, and search-and-rescue missions. The current...
Briefs: Robotics, Automation & Control
Robotic Surgical Devices, Systems, and Related Methods
Various advancements have been made in the development of miniature in vivo surgical robots. These robots are designed to perform Laparoendo scopic Single-Site Surgery (LESS). After being inserted through a single incision, these robots can perform surgical procedures in a dexterous workspace....
Briefs: Robotics, Automation & Control
Ship Classification Using Gnostic Fields
There are many applications for Autonomous Seaborne Vessels (ASVs). The seaborne cargo shipping industry moves over 9 billion tons of cargo per year, is worth $375 billion, and is responsible for 90 percent of world trade. Autonomous cargo ships could reduce the operating expenses of cargo ships by 44%. ASVs...
Briefs: Robotics, Automation & Control
Tension-Stiffened and Tendon-Actuated Space Manipulators
The Space Shuttle Remote Manipulator System (SRMS) and Space Station Remote Manipulator System (SSRMS) have proven the benefit of long-reach manipulators, with the reach of both manipulators in the l5-18-m class. Manipulators with greater reach provide many benefits. The SRMS’s limited...
Briefs: Robotics, Automation & Control
NASA Tensegrity Robotics Toolkit (NTRT)
Tensegrity robots have many unique properties useful for robots intended to operate in natural settings, yet the exploration of how to build and control such robots is just beginning. Many of their positive qualities, such as multipath force distribution, compliance, and their oscillatory nature, also make...
Briefs: Robotics, Automation & Control
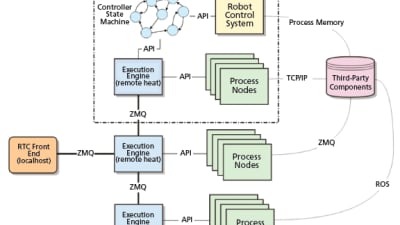
RoboSimian Software System from the DARPA Robotics Challenge Finals
A software architecture to allow semi-autonomous mobile manipulation of highly dexterous robots under degraded communications was developed to enable remote operation of a mobile manipulation robot as a first responder in a disaster-response scenario. The software architecture is...
Briefs: Robotics, Automation & Control
Autonomous Micro Aerial Vehicle Flight Using Optical Flow and Inertial Cues
Micro aerial vehicles (MAVs) are agile and have unstable flight dynamics. They require a failsafe method to be navigated through areas even without GPS coverage. The approach of this work is to use only the feature matches between two consecutive images, i.e. optical flow...
Briefs: Robotics, Automation & Control
Universal Robotically Operated Leave-Behind Gripper
This universal robotically operated leavebehind gripper allows robotic (or extravehicular activity — EVA) attachment capability of any object at eight existing types of attachments at the International Space Station (ISS). It enables expansion of external stowage and payload sites to include...
Briefs: Robotics, Automation & Control
DshellCommon Simulation Framework
DshellCommon software has been developed for specifying and executing generic multibody system simulations. This innovation helps the user create and execute simulations for mechanisms, vehicles, spacecraft, or other systems by making it easier to write simulation “run scripts” for systems that vary from simple...
Briefs: Robotics, Automation & Control
Neutrally Buoyant Tank Inspection and Cleaning Robot
Huge savings in cost and inspection times (as well as improved safety) could be obtained by performing in-service inspection of tank floors and walls with robotic devices. This would have a reduced environmental impact and meet EPA and state regulations.
Briefs: Robotics, Automation & Control
Visualization and Introspection for Teleoperation of Robotic Systems
The Space Exploration and Analysis Simulations (SEAS) project at JPL performs analysis of advanced mission and system concepts on behalf of NASA. One of the concepts being explored involves operation of robotic rovers on the Moon from a remote operator station located either at a...
Briefs: Robotics, Automation & Control
The Exoskeleton (EXO) is a device that falls into a new classification of robotics called wearable robots. On-orbit applications include countermeasures and dynamometry, allowing for continual assessment of a...

Briefs: Robotics, Automation & Control
Preliminary data was recently provided for a reaction sphere prototype on NASA’s zero-gravity parabolic flight vehicle. Gyroscope telemetry indicates that reaction spheres were...

Briefs: Robotics, Automation & Control
Nanosatellite Launch Adapter System
NASA has developed a Nanosatellite Launch Adapter System (NLAS) that maximizes the efficiency of satellite launch missions. NLAS increases access to space while simplifying the integration process of miniature satellites, called nanosats or CubeSats, onto launch vehicles. While a complete NLAS consists of an...
Briefs: Robotics, Automation & Control
James Webb Space Telescope Microshutters Subsystem Project Thermal Chamber Ground Support Equipment Automated Control
An automated control system for the microshutter assembly (MSA) portion of the JWST MSS (James Webb Space Telescope Micro shutters Subsystem) was developed. This is a cryogenic device that operates at 35 K. Cooling down and warming...
Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Electronics & Computers
Upcoming Webinars: Electronics & Computers
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Unmanned Systems
Upcoming Webinars: Unmanned Systems
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: AR/AI
Upcoming Webinars: AR/AI
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Battery Abuse Testing: Pushing to Failure