51
-1
240
30
Briefs: Robotics, Automation & Control
The approach could lead to more flexible health monitors, wearable devices, sensors, optical communication systems, and soft robotics.

Briefs: AR/AI
Exoskeleton legs are capable of thinking and making control decisions on their own using artificial intelligence technology.

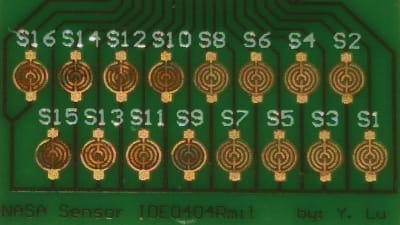
Briefs: Manufacturing & Prototyping
A deep-learning technique optimizes the arrangement of sensors on a robot’s body to ensure efficient operation.

Briefs: Energy
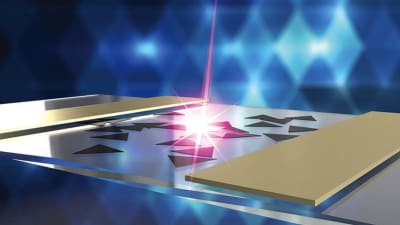
The soft robot harvests energy from a laser beam and can crawl on horizontal surfaces and climb vertical walls and an upside-down glass ceiling.

Briefs: Aerospace
The valve enables telerobotic resupplying of media such as propellant and pressurant.

Briefs: Robotics, Automation & Control
The robot can walk, run, jump, and interact with the environment in synchrony with a human operator.

Briefs: Electronics & Computers
Applications include wearables, airplane cabin monitoring, medical diagnostics, and indoor air quality measurement.
Briefs: Energy
A connection between electricity and mechanical motion in soft, rubber-like materials could improve robot range.

Briefs: Mechanical & Fluid Systems
This artificial muscle technology enables more human-like motion.

Briefs: Robotics, Automation & Control
The robot firmly but gently grasps objects as small as 1 millimeter in diameter.

Briefs: Energy
Solid-state batteries offer a higher level of safety and potentially longer life than lithium-ion batteries.

Briefs: Sensors/Data Acquisition
The algorithm speeds up the planning process robots use to adjust their grip on objects for picking and sorting or tool use.

Briefs: Robotics, Automation & Control
A production-based X-ray solution performs product quality evaluation directly on the manufacturing line.

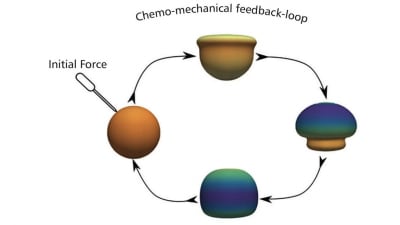
Briefs: Mechanical & Fluid Systems
The soft material demonstrates autonomous, heartbeat-like oscillating properties.
Briefs: Test & Measurement
The system uses infrasonic acoustics for weather monitoring and for drone or UAV activity.

Briefs: Robotics, Automation & Control
These tiny aerial robots can operate in cramped spaces and withstand collisions.

Briefs: Robotics, Automation & Control
Servo motion control delivers powerful, fast, and precise movement onboard robots and for associated equipment.
Briefs: Robotics, Automation & Control
The open-architecture flight software package provides solutions for onboard orbit determination.
Briefs: Sensors/Data Acquisition
A robot could immediately alert a human of small changes in their surrounding environment.

Briefs: AR/AI
The system enables robots to predict what their human coworker will do next.

Briefs: Test & Measurement
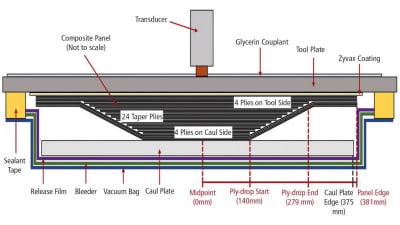
This system enhances processing via real-time, non-destructive defect tracking.
Briefs: Lighting
This could lead to the commercial development of smart glass, with applications ranging from imaging to advanced robotics.
Briefs: Manufacturing & Prototyping
Biobots based on muscle cells can swim at unprecedented velocities.

Briefs: Imaging
Exoskeleton legs are capable of thinking and making control decisions on their own using artificial intelligence technology.

Briefs: Mechanical & Fluid Systems
A catalytic reaction causes a two-dimensional, chemically coated sheet to spontaneously morph into a three-dimensional gear.

Briefs: RF & Microwave Electronics
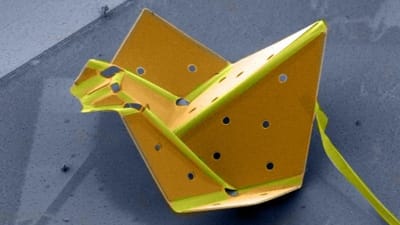
The machines fold themselves within 100 milliseconds and can flatten and refold thousands of times.
Briefs: Motion Control
The walking quadruped is controlled and powered by pressurized air.

Briefs: Sensors/Data Acquisition
The design could contribute to various applications in the robotics field such as smart prosthetics and human-robot interaction.
Briefs: Test & Measurement
The software could help reduce cost and waste for companies using additive manufacturing to mass-produce parts in factories.

Top Stories
 Blog: Power
Blog: Power
My Opinion: We Need More Power Soon — Is Nuclear the Answer?
 Blog: AR/AI
Blog: AR/AI
Aerial Microrobots That Can Match a Bumblebee's Speed
 News: Energy
News: Energy
 Blog: Electronics & Computers
Blog: Electronics & Computers
Turning Edible Fungi into Organic Memristors
 Blog: Robotics, Automation & Control
Blog: Robotics, Automation & Control
Microscopic Swimming Machines that Can Sense, Respond to Surroundings
 INSIDER: Sensors/Data Acquisition
INSIDER: Sensors/Data Acquisition
Webcasts
 Upcoming Webinars: Energy
Upcoming Webinars: Energy
Hydrogen Engines Are Heating Up for Heavy Duty
 Upcoming Webinars: Transportation
Upcoming Webinars: Transportation
Advantages of Smart Power Distribution Unit Design for Automotive...
 Upcoming Webinars: Automotive
Upcoming Webinars: Automotive
Quiet, Please: NVH Improvement Opportunities in the Early Design...
 Upcoming Webinars: Test & Measurement
Upcoming Webinars: Test & Measurement
From Spreadsheets to Insights: Fast Data Analysis Without Complex...
 Upcoming Webinars: Power
Upcoming Webinars: Power
Battery Abuse Testing: Pushing to Failure