
A proposal has been made to develop bimorph actuators and force sensors based on carbon nanotubes. The proposed devices could make it possible to generate, sense, and control displacements and forces on a molecular scale, and could readily be integrated with conventional electronic circuits. These devices could also enable the development of a variety of novel microelectromechanical systems, including low-power mechanical signal processors, nanoscale actuators and force sensors, and even microscopic robots.
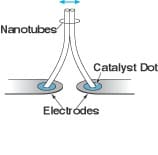
The proposed bimorph device could be fabricated by growing two nanotubes by chemical vapor deposition (CVD) on closely spaced catalyst dots over prepatterned bias electrodes on a substrate. It is likely that during the growth of the nanotubes, the van der Waals attraction would cause the nanotubes to become attached to each other along their sides, as shown in the figure. Because the electrical conductivity of a nanotube perpendicular to its length is much lower than the electrical conductivity along its length, this configuration should make it possible to maintain a significant differential voltage across the two nanotubes, as needed to cause a differential length change in the pair. Conversely, the application of a lateral external force to the tip of the pair should give rise to a voltage between the electrodes so that this device can also function as a sensitive force detector.
To be able to fabricate nanotube bimorph actuators with the configuration shown in the figure, it will be necessary to develop the means to control the positions and orientations of individual nanotubes on such substrates as silicon wafers. This is likely to entail the use of electron-beam lithography, lift-off, and etching for fabricating catalyst dots 5 to 15 nm wide on pre-patterned electrodes. Suitable catalyst materials could include Ni or alloys of Ni, Co, Fe, and/or Mo. In the contemplated CVD process, suitable precursor and carrier gases (e.g., methane, ethylene, or carbon monoxide plus hydrogen plus either argon or nitrogen) would interact with the substrate (which would be heated to a temperature between 600 and 950 °C), yielding selective growth of nanotubes out from the catalyst dots. There are numerous potential variations on this basic fabrication scheme, including orienting the dots so that the nanotubes grow parallel (instead of perpendicular) to the substrate surface and incorporating other materials to modify the electrical and mechanical properties of nanotube pairs.
This work was done by Brian Hunt, Flavio Noca, and Michael Hoenk of Caltech for NASA's Jet Propulsion Laboratory. For further information, access the Technical Support Package (TSP) free on-line at www.nasatech.com/tsp under the Mechanics category.
In accordance with Public Law 96-517, the contractor has elected to retain title to this invention. Inquiries concerning rights for its commercial use should be addressed to
Intellectual Property group
JPL
Mail Stop 202-233
4800 Oak Grove Drive
Pasadena, CA 91109
1-(818)-354-2240
Refer to NPO-21153, volume and number of this NASA Tech Briefs issue, and the page number.
This Brief includes a Technical Support Package (TSP).
Carbon Nanotube Bimorph Actuators and Force Sensors
(reference NPO-21153) is currently available for download from the TSP library.
Don't have an account?
Overview
The document presents a NASA Technical Support Package focused on the development and application of carbon nanotube bimorph actuators and force sensors. This innovative research, conducted by inventors Brian Hunt, Flavio Noca, and Michael E. Hoenk, explores the unique properties of carbon nanotubes (CNTs) and their potential to revolutionize various fields, particularly in microelectromechanical systems (MEMS).
Carbon nanotubes are cylindrical nanostructures with exceptional mechanical, electrical, and thermal properties. The document highlights how these properties can be harnessed to create bimorph actuators, which are devices that can bend or change shape in response to electrical stimuli. This capability allows for precise control of movement at a molecular scale, making CNT-based actuators ideal for applications in robotics, aerospace, and biomedical devices.
The research emphasizes the advantages of using carbon nanotubes over traditional materials. CNTs are lightweight, strong, and can be engineered to respond to various stimuli, enabling the creation of highly efficient and responsive actuators. The document outlines the design and fabrication processes for these actuators, detailing how they can be integrated into larger systems to perform complex tasks.
In addition to actuators, the document discusses the development of force sensors utilizing carbon nanotubes. These sensors can detect minute changes in force or pressure, making them suitable for applications in structural health monitoring, robotics, and human-computer interaction. The sensitivity and accuracy of CNT-based sensors are highlighted as key benefits, allowing for real-time monitoring and feedback in various environments.
The potential applications of carbon nanotube bimorph actuators and force sensors are vast. They could lead to advancements in low-power mechanical signal processors, enabling more efficient data processing and control in electronic devices. Furthermore, the integration of these technologies into microscopic robots could open new avenues in fields such as medicine, where targeted drug delivery and minimally invasive surgeries could be enhanced.
Overall, the document underscores the transformative potential of carbon nanotube technology in creating advanced actuators and sensors. By leveraging the unique properties of CNTs, researchers aim to push the boundaries of what is possible in engineering and technology, paving the way for innovative solutions to complex challenges in various industries.